OMRON NJ 通过EtherCAT 控制IS620N 使用说明 1、 准备工作 1
1、软件:OMRON Sysmac 软件,至少 1
47 以上; 1
2、硬件:IS620N EEPROM 中至少已升级 IS620N-Ecat_v1
xml 文件(出厂已设置); 1
3、配置文件:至少 IS620N-Ecat_v1
xml,版本为:0X00010000; 注意:Sysmac 软件为 OMRON NJ 编程软件;IS620N 中必须烧录 xml 文件,若公司出厂未烧录,可使用BeckHoff 软件 TwinCAT 通过EtherCAT 总线烧录;xml 文件需要导入到 Sysmac 软件中,作为识别 IS620N 驱动器的配置文件; 2、实施步骤 2
1、NJ、IS620N 通电,通过网线连接 注意:IS620N 下端口为 IN,上端口为 OUT,接线时请注意; 2
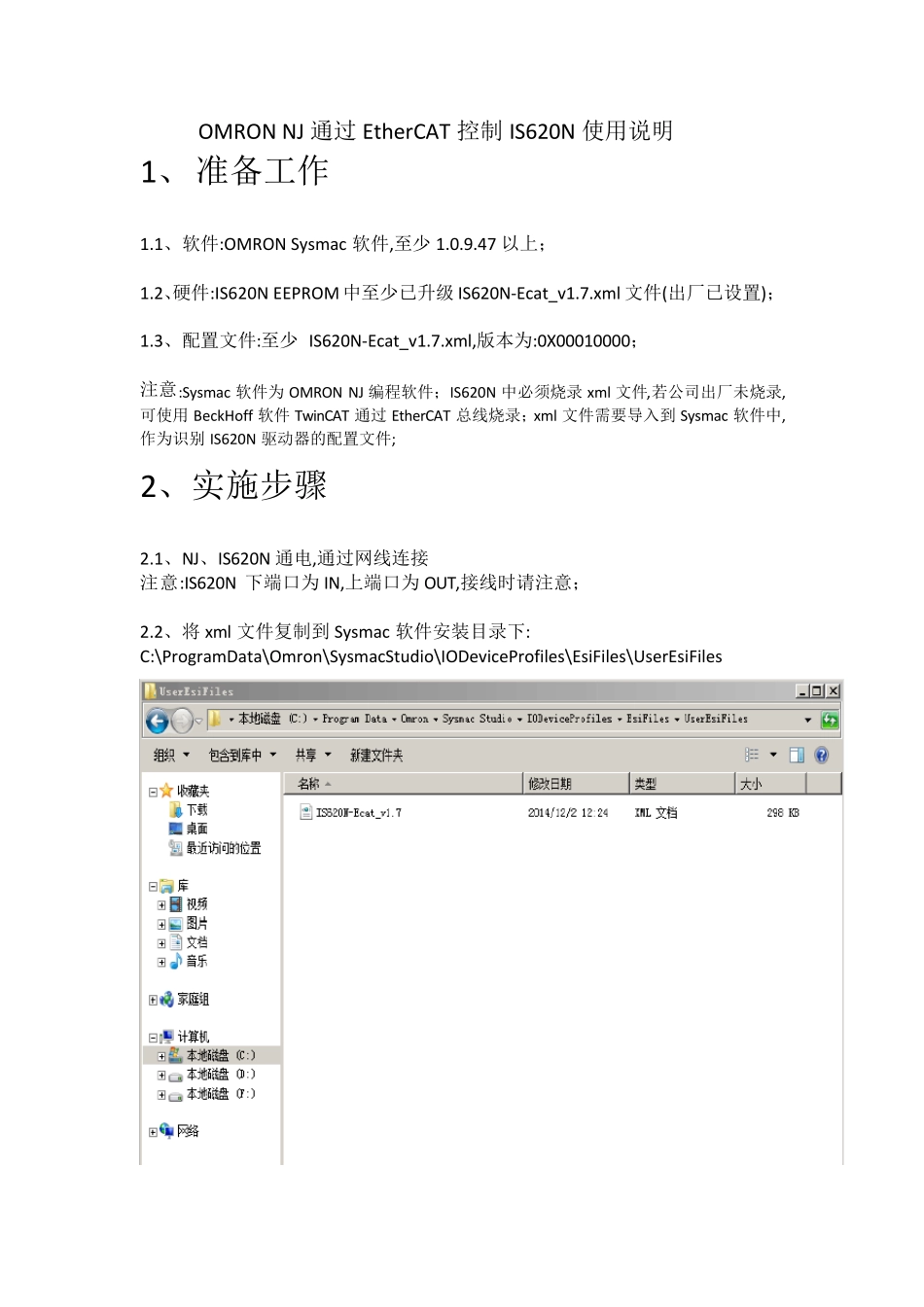
2、将 xml 文件复制到 Sysmac 软件安装目录下: C:\ProgramData\Omron\SysmacStudio\IODeviceProfiles\EsiFiles\UserEsiFiles 2
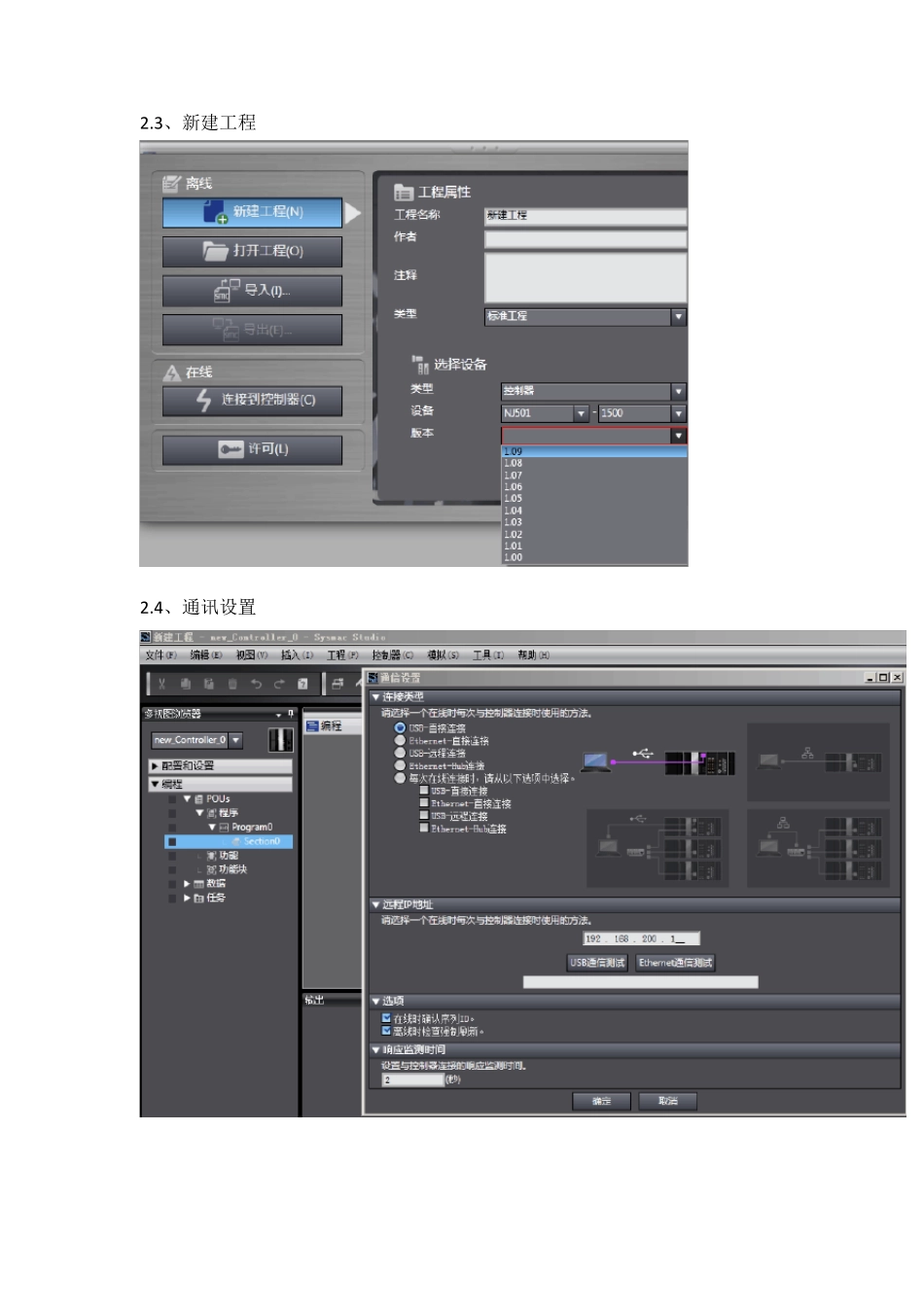
3、新建工程 2
4、通讯设置 2
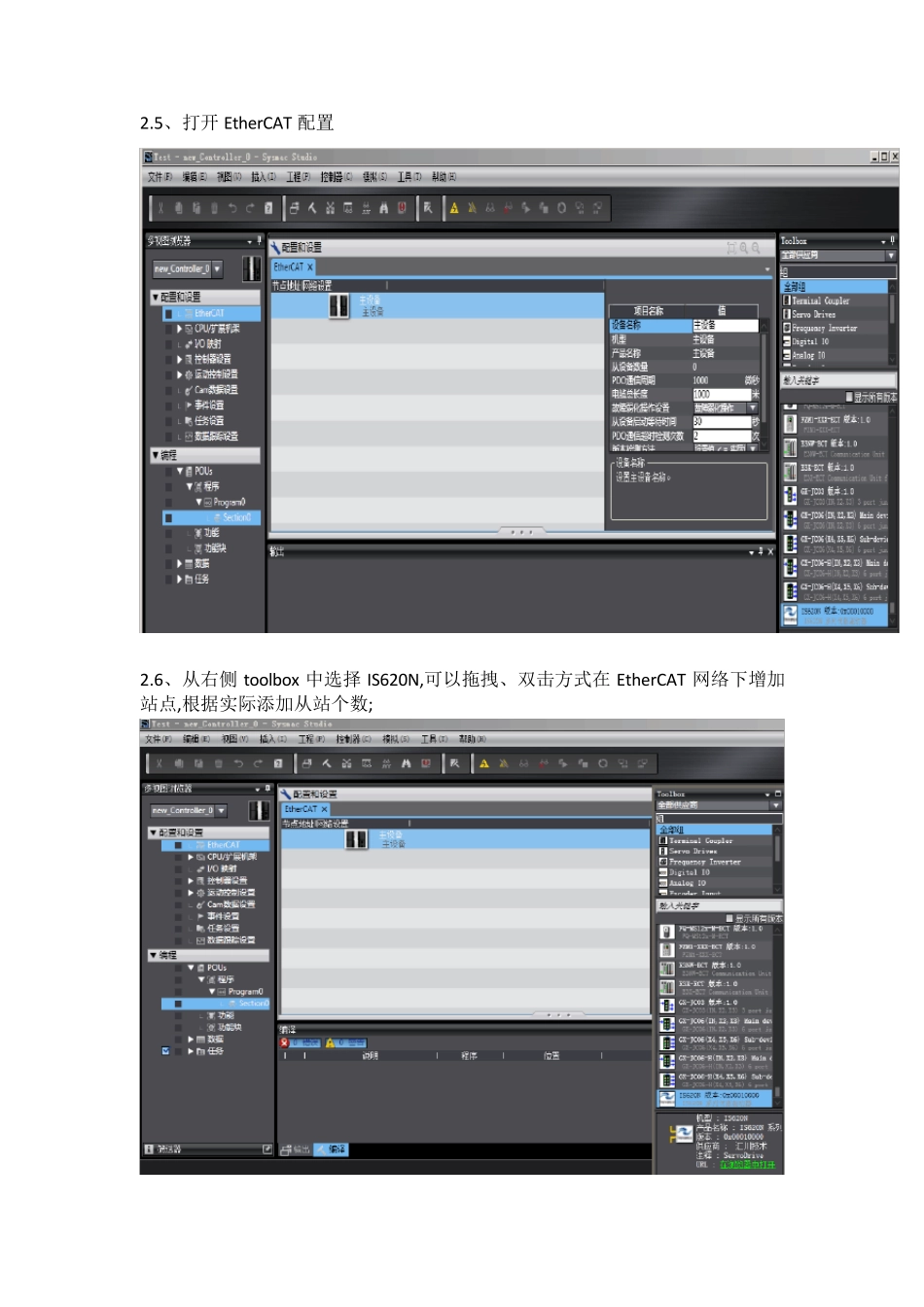
5、打开 EtherCAT 配置 2
6、从右侧 toolbox 中选择 IS620N,可以拖拽、双击方式在 EtherCAT 网络下增加站点,根据实际添加从站个数; 2
7、注意,若是刚出厂新伺服,则需要写入节点地址,选择”在线”-右击“主设备”-“写入设备节点地址”,新伺服刚接入NJ 系统中节点默认为 0,修改成不为零即可,修改完毕后,选择“与物理网络配置比较并合并” 2
8、选择”应用物理网络配置” 2
9、选择CPU 扩展机架-“与实际单元配置比较和合并” 2
10、选择需要设置的节点号,选择”编辑 PDO 映射设置” 2
11、输出输出映射