1 PID controller From Wikipedia, the free encyclopedia A proportional –integral –derivative controller (PID controller) is a generic
control loop feedback mechanism widely used in industrial control systems
A PID controller attempts to correct the error between a measured process variable and a desired setpoint by calculating and then outputting a corrective action that can adjust the process accordingly
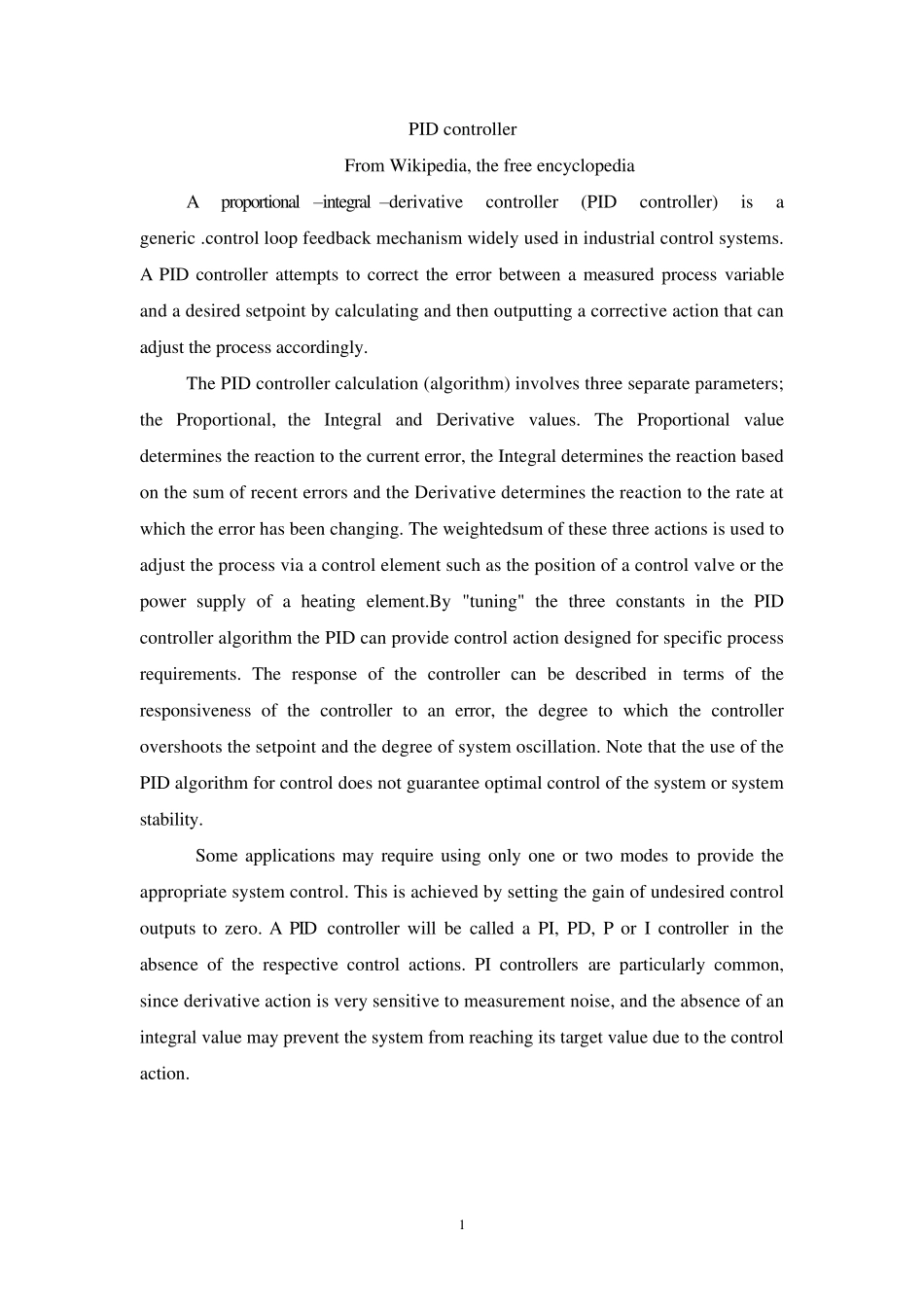
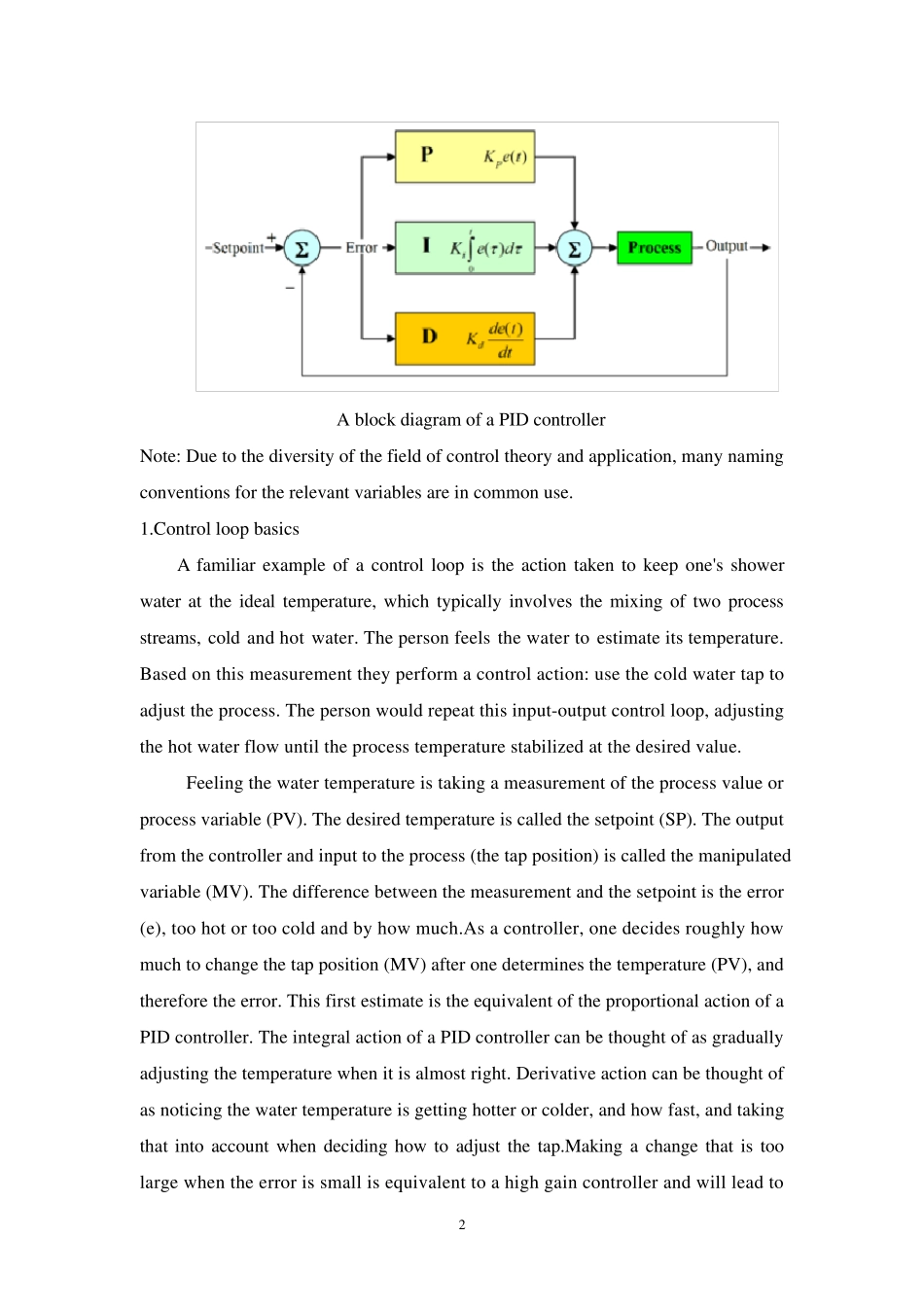
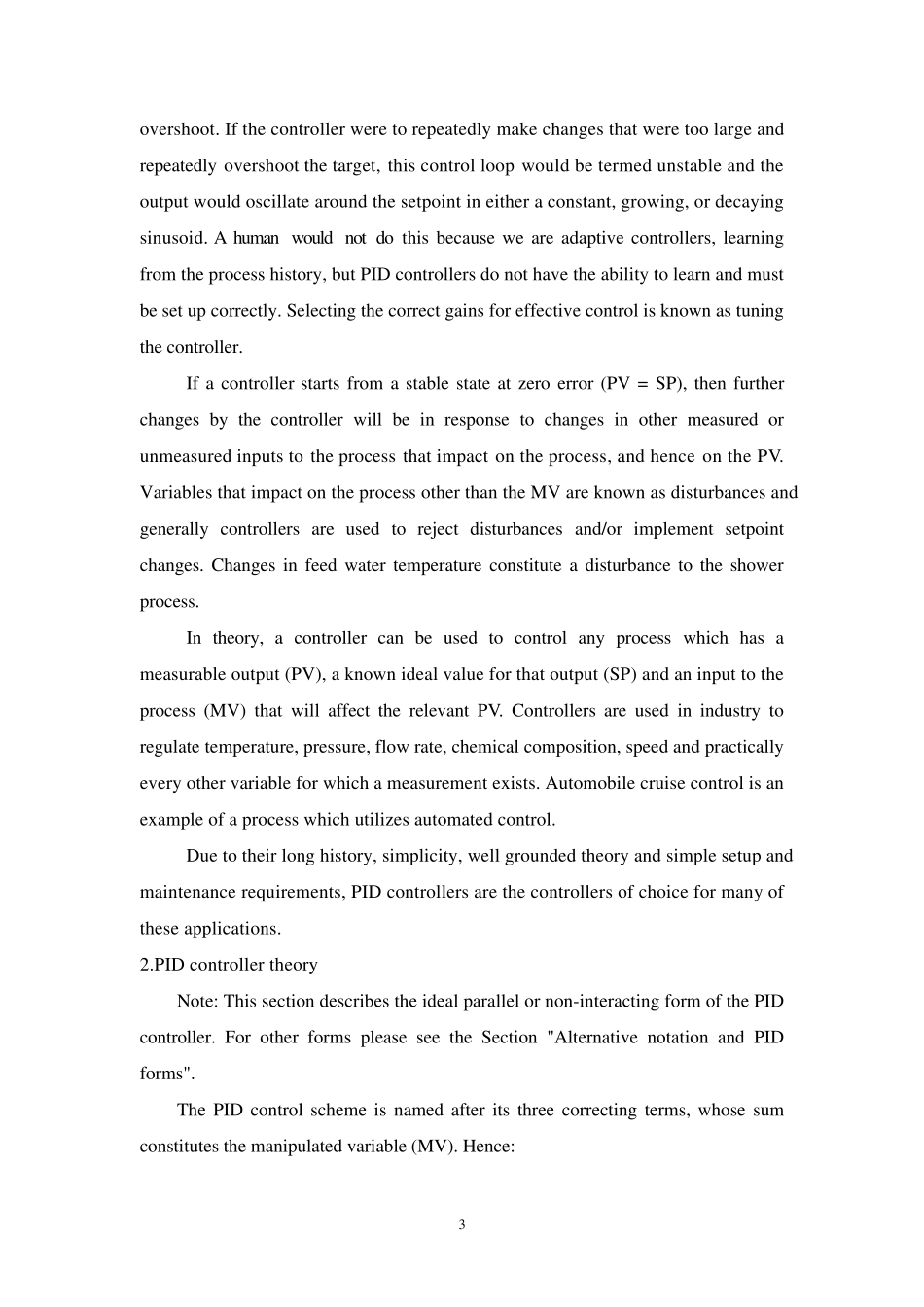
The PID controller calculation (algorithm) involves three separate parameters; the Proportional, the Integral and Derivative values
The Proportional value determines the reaction to the current error, the Integral determines the reaction based on the sum of recent errors and the Derivative determines the reaction to the rate at which the error has been changing
The weightedsum of thes