速度包络的建立 S7-200有两个内置PTO/PWM发生器,用以建立高速脉冲串(PTO)或脉宽调节(PWM)信号波形
一个发生器指定给数字输出点Q0
0,另一个发生器指定给数字输出点Q0
当组态一个输出为PTO操作时,生成一个50%占空比脉冲串用于步进电机或伺服电机的速度和位置的开环控制
内置PTO功能提供了脉冲串输出,脉冲周期和数量可由用户控制
但应用程序必须通过PLC内置I/O提供方向和限位控制
为了简化用户应用程序中位控功能的使用,STEP7--Micro/WIN提供的位控向导可以帮助您在几分钟内全部完成PWM,PTO或位控模块的组态
向导可以生成位置指令,您可以用这些指令在您的应用程序中为速度和位置提供动态控制
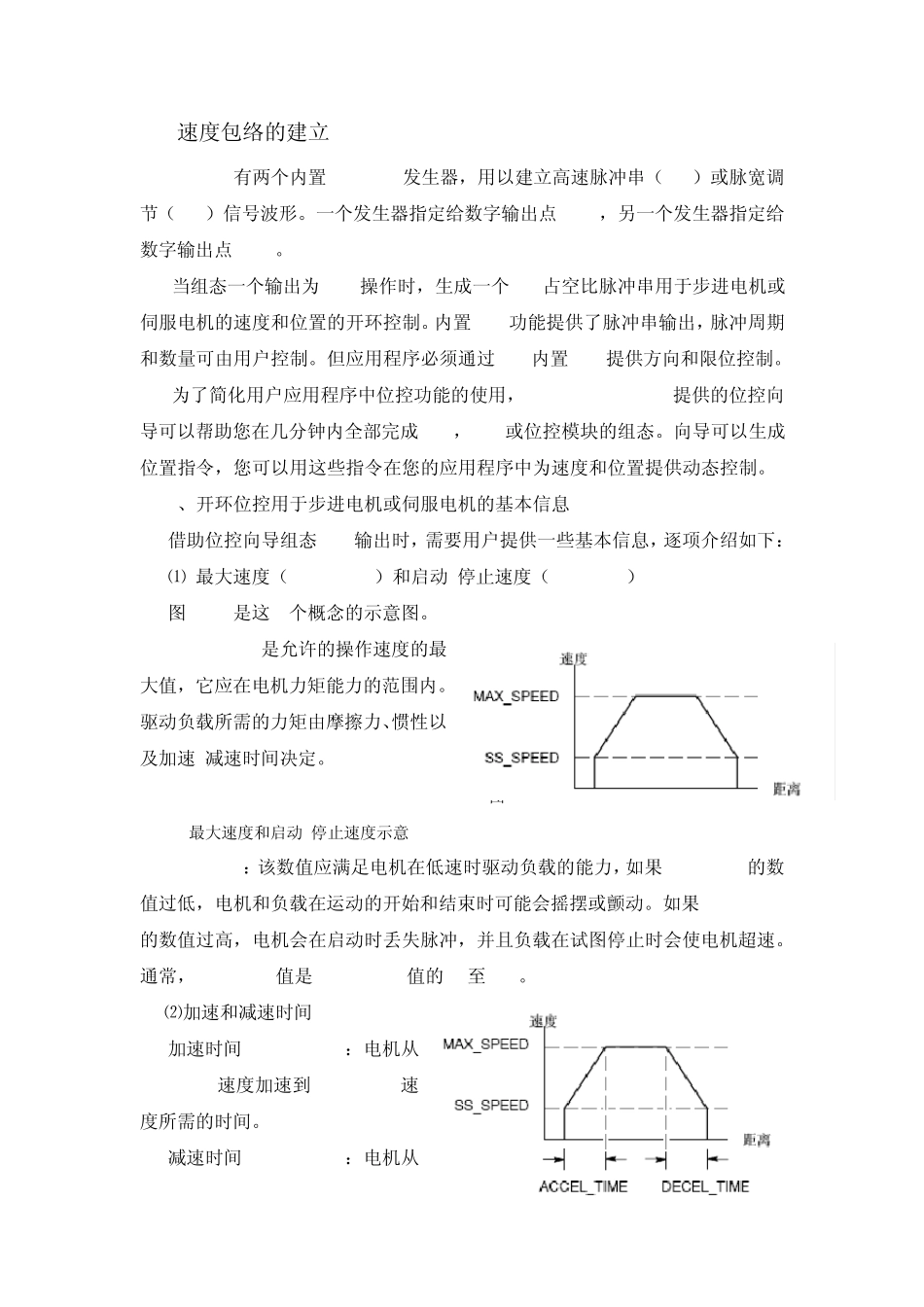
2、开环位控用于步进电机或伺服电机的基本信息 借助位控向导组态PTO输出时,需要用户提供一些基本信息,逐项介绍如下: ⑴ 最大速度(MAX_SPEED)和启动/停止速度(SS_SPEED) 图 7-14是这2个概念的示意图
MAX_SPEED是允许的操作速度的最大值,它应在电机力矩能力的范围内
驱动负载所需的力矩由摩擦力、惯性以及加速/减速时间决定
图7-14 最大速度和启动/停止速度示意 SS_SPEED:该数值应满足电机在低速时驱动负载的能力,如果 SS_SPEED的数值过低,电机和负载在运动的开始和结束时可能会摇摆或颤动
如果 SS_SPEED的数值过高,电机会在启动时丢失脉冲,并且负载在试图停止时会使电机超速
通常,SS_SPEED值是 MAX_SPEED值的5%至 15%
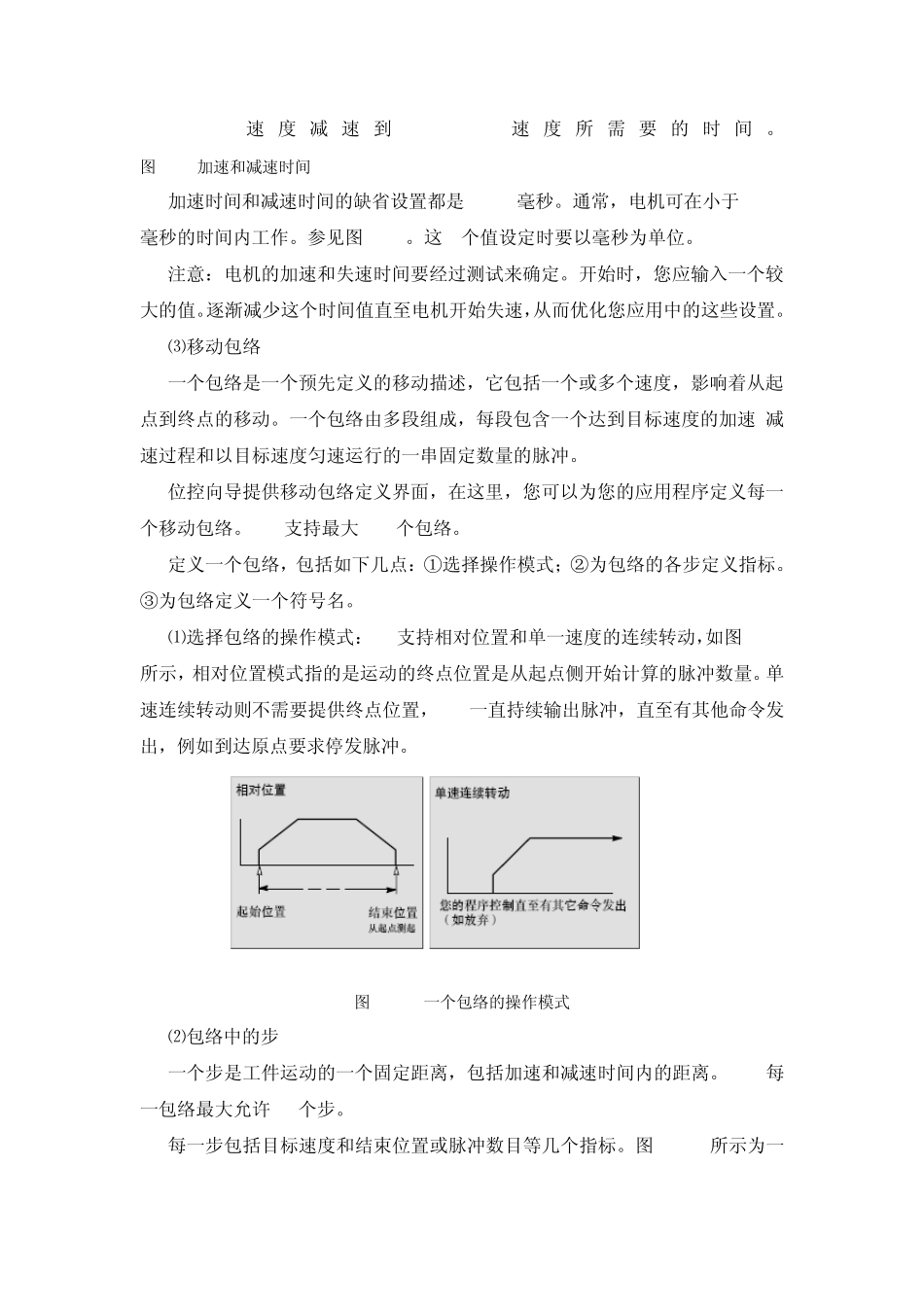
⑵加速和减速时间 加速时间 ACCEL_TIME:电机从SS_SPEED速度加速到 MAX_SPEED速度所需的时间
减速时间 DECEL_TIME:电机从MAX_SPEED速 度 减 速 到SS_SPEED速 度 所 需 要 的 时 间
图 7-15加速和