班 级 : 学 号 : 姓 名 : 武 汉 科 技 大 学 机 械 自 动 化 学 院 机 械 基 础 实 验 示 范 中心 2 2 0 0 4
1 0 乐高机器人创新设计实验指导书 一、 实验目的 1 、培养学生用创造性思维方法,设计、搭建新型的机构或装置; 2 、引导学生运用乐高机器人套件,设计、制作智能机器人,提高学生的观察分析、动手、创造能力,培养学生的参与、竞争、实践与协作意识; 3 、加强学生对机电一体化的实践认识,培养学生的创新意识及综合设计能力
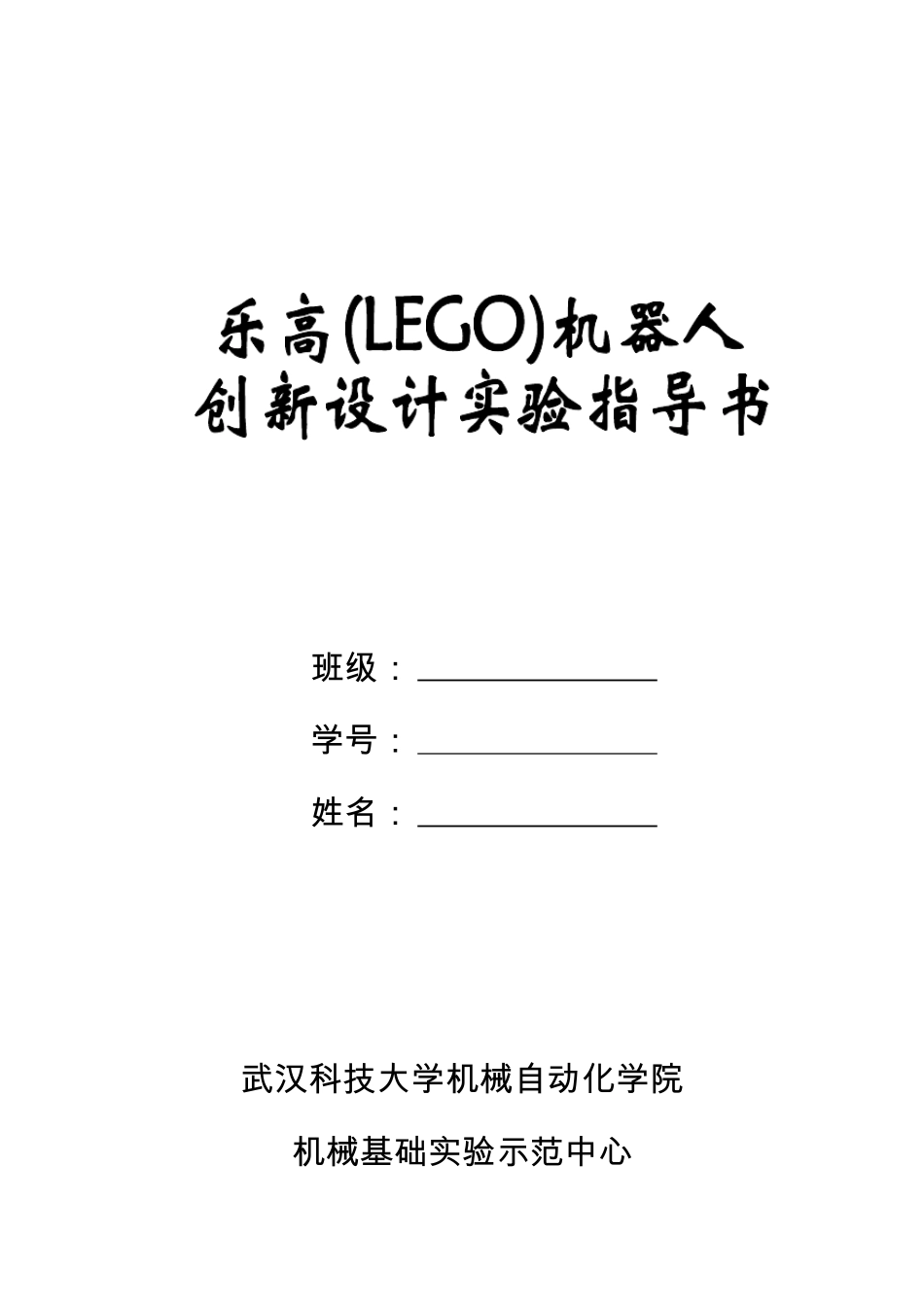
二、 实验原理 乐高机器人由机械结构件、控制器、电机、传感器等多个模块组成,采用搭积木方式搭建,硬件――就是积木,软件――采用图形化编程语言,不涉及单片机汇编语言与机器码编程
这就使系统理论教学摆脱了单片机语言、电路结构、微机接口等分支学科的束缚,可以直接根据系统要求,组态并展示系统功能
让学生主动体现设计思想,理解系统设计原理,更好地关注于创新机构设计以及机电一体化系统集成
三、 实验仪器与设备 1
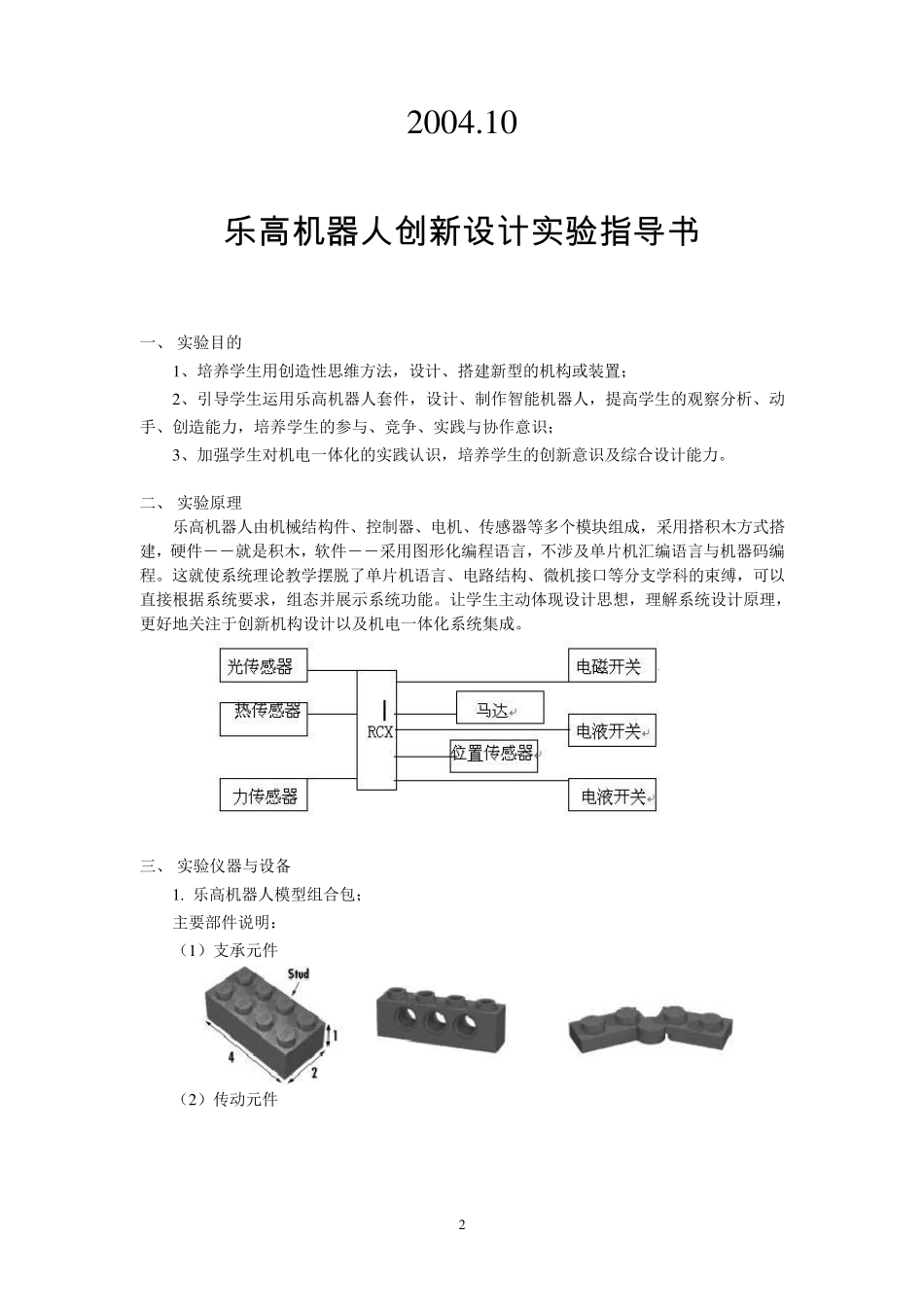
乐高机器人模型组合包; 主要部件说明: (1 )支承元件 (2 )传动元件 3 (3)动力元件 (4)传感器 触动传感器 光电传感器 角度传感器 (5)RCX 微型电脑与IR 红外发射仪 (6)连接导线、轴套类零件与其它辅助元件 4 2
乐高机器人专用电源; 3
安装MindStorms Robolab 软件的电脑; 4
乐高专用智能接口板; 5
连接电线,摄子、螺丝刀等常用工具
四、 实验前的准备工作 1
按模型组合包设备清单清点模型零件,并按类型分类置放于装料盘中; 2
认真阅读模型组合包操作手册; 3
按组装指导图搭接模型,掌握组合模型的拼接方法; 4
熟悉动力元器件的装配、连接方法; 包括:电动机、传感器、变压器、气动元件、各种开关等; 5
熟悉组合包配备的软件Robolab 及接