第四章机器人设计(2)活动项目二六足爬虫中小学通用技术课程配套教材第二册课前准备学习目标1.认识生活中的六足爬虫,按照辅助教材的拼装步...
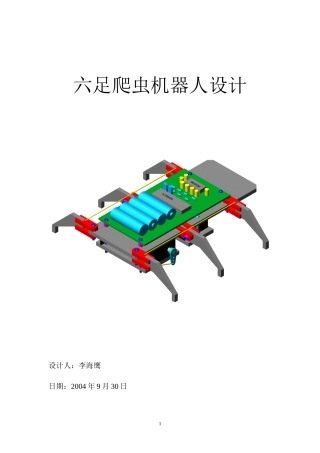
六足爬虫机器人设计设计人:李海鹰日期:2004年9月30日1目录前言.........................................................................
六足爬虫机器人设计设计人:李海鹰日期:2004年9月30日1目录前言.........................................................................
![[电子设计]红外遥控六足爬虫机器人设计](https://file.xiaomilidoc.com/convert/202412/04/3263664/thumb-P1-27e46af6-2ed2-4ed8-a4ad-e8165d43ae21-320x453.webp)
第1页共24页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共24页六足爬虫机器人设计设计人:李海鹰日期:2004年9月3...
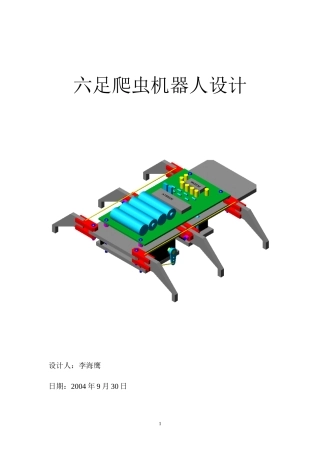
六足爬虫机器人设计设计人:李海鹰日期:2004年9月30日目录前言..........................................................................
六足爬虫机器人设计设计人:李海鹰日期:2004年9月30日目录前言..........................................................................

目录1引言1.1智能爬行搜救机器人机器人研究目的和意义......................................................11.2智能爬行搜救机器人研究...

六足行走运动平台结构设计摘要随着人类探索自然界步伐的不断加速,各应用领域对具有复杂环境自主移动能力机器人的需求,日趋广泛而深入。理...

六足仿生机器人及其步态研究现状摘要与一般的机器人相比(比如轮式机器人),六足仿生机器人的一个最大的优点是对行走路面的要求很低,它可以跨...
六足爬虫机器人设计目录前言...........................................................................................................