1 / 18 第五章数控检测装置5
1 概述组成:位置测量装置是由检测元件 (传感器) 和信号处理装置组成
作用:闭环数控系统为反馈控制的随动系统,它的输出量是机械位移、速度或加速度, 利用这些量的反馈实现精确的位移、速度控制目的
数控系统的检测装置(即传感器)起着测量和反馈两个作用,它发出的信号传送给数控装置或专用控制器,构成闭环控制
从一定意义上看,数控机床的加工精度和定位精度主要取决于检测装置的精度
传感器能分辨出的最小测量值称为分辨率
分辨率不仅取决于传感器本身,也取决于测量线路
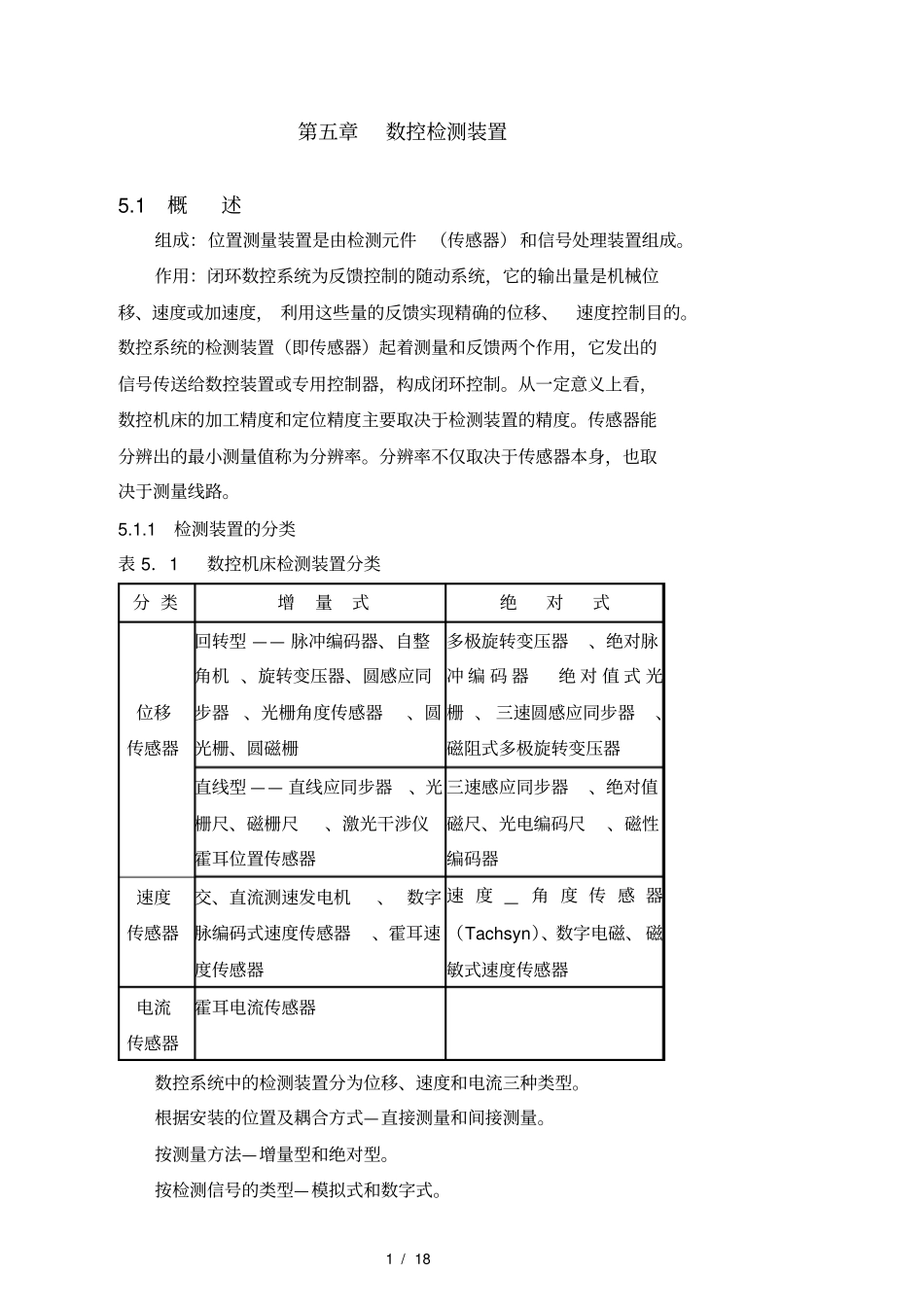
1 检测装置的分类表 5.1 数控机床检测装置分类分 类增量式绝对式位移传感器回转型 —— 脉冲编码器、自整角机 、旋转变压器、圆感应同步器、光栅角度传感器、圆光栅、圆磁栅多极旋转变压器、绝对脉冲 编 码 器绝 对 值 式 光栅 、 三速圆感应同步器、磁阻式多极旋转变压器直线型 —— 直线应同步器、光栅尺、磁栅尺、激光干涉仪霍耳位置传感器三速感应同步器、绝对值磁尺、光电编码尺、磁性编码器速度传感器交、直流测速发电机、 数字脉编码式速度传感器、霍耳速度传感器速 度 — 角 度 传 感 器(Tachsyn)、数字电磁、 磁敏式速度传感器电流传感器霍耳电流传感器数控系统中的检测装置分为位移、速度和电流三种类型
根据安装的位置及耦合方式—直接测量和间接测量
按测量方法—增量型和绝对型
按检测信号的类型—模拟式和数字式
2 / 18 根据运动型式—回转型和直线型
按信号转换的原理—光电效应、光栅效应、电磁感应原理、压电效应、压阻效应和磁阻效应等
2 数控测量装置的性能指标及要求传感器的性能指标应包括静态特性和动态特性,主要如下
精度:符合输出量与输入量之间特定函数关系的准确程度称作精度
要满足高精度和高速实时测量要求
分辨率:分辩率应适应机床精度和伺服系统的要求