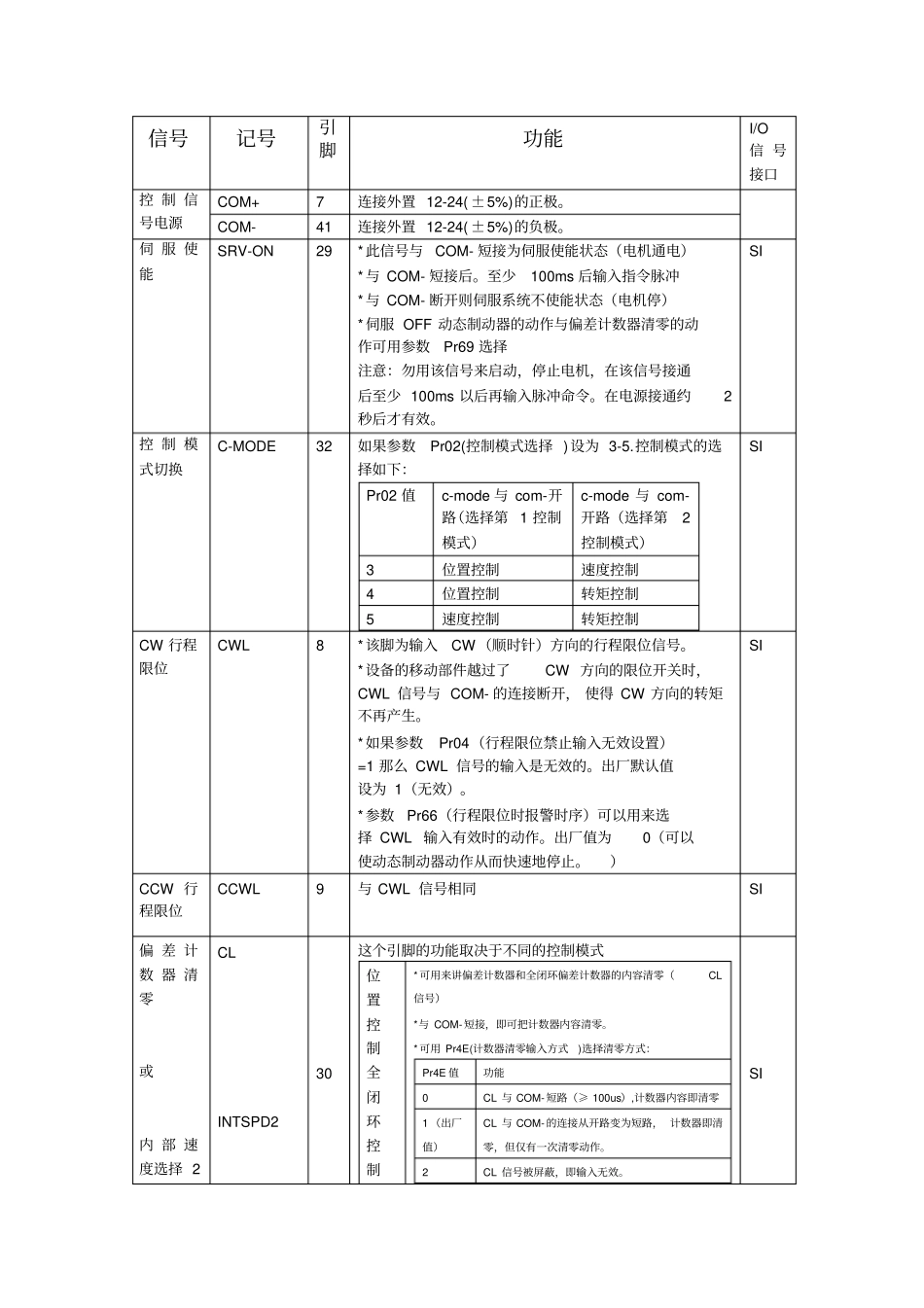
信号记号引脚功能I/O信 号接口控 制 信号电源COM+ 7 连接外置 12-24( ±5%)的正极
COM- 41 连接外置 12-24( ±5%)的负极
伺 服 使能SRV-ON 29 *此信号与 COM- 短接为伺服使能状态(电机通电)*与 COM- 短接后
至少100ms 后输入指令脉冲*与 COM- 断开则伺服系统不使能状态(电机停)*伺服 OFF 动态制动器的动作与偏差计数器清零的动作可用参数Pr69 选择注意:勿用该信号来启动,停止电机,在该信号接通后至少 100ms 以后再输入脉冲命令
在电源接通约2秒后才有效
SI 控 制 模式切换C-MODE 32 如果参数Pr02(控制模式选择 )设为 3-5
控制模式的选择如下:Pr02 值c-mode 与 com-开路(选择第 1 控制模式)c-mode 与 com-开路(选择第2控制模式)3 位置控制速度控制4 位置控制转矩控制5 速度控制转矩控制SI CW 行程限位CWL 8 *该脚为输入CW(顺时针)方向的行程限位信号
*设备的移动部件越过了CW 方向的限位开关时,CWL 信号与 COM- 的连接断开, 使得 CW 方向的转矩不再产生
*如果参数Pr04(行程限位禁止输入无效设置)=1 那么 CWL 信号的输入是无效的
出厂默认值设为 1(无效)
*参数Pr66(行程限位时报警时序)可以用来选择 CWL 输入有效时的动作
出厂值为0(可以使动态制动器动作从而快速地停止
)SI CCW 行程限位CCWL 9 与 CWL 信号相同SI 偏 差 计数 器 清零或内 部 速度选择 2 CL INTSPD2 30 这个引脚的功能取决于不同的控制模式位置控制全闭环控制* 可用来讲偏差计数器和全闭环偏差计数器的内容清零(CL信号)*与 COM- 短接,即可把计数器内容清零
* 可用 Pr4E(计数器清零输入方式)选择清零方