Matlab/Simulink/Stateflow 控制算法建模规范 3
0 版 Mathworks 汽车咨询委员会 (MAAB) 1 修订历史 日期 修订 2001
04 初始版本 1
0 版发布 2007
27 更新版本 2
0 版发布 2011
30 更新版本 3
0 版发布 2012
31 更新版本 4
0 版发布 2 介 绍 2
1 动 机 MAAB 建 模 规 范 无 论 是 在 组 织 内 部 还 是 在 与 合 作 伙 伴 和 分 包 商 合作 时 都 是 项 目 成 功 与 团 队 协 作 的 重 要 基 础
遵 守 建 模 规 范 是 实 现 以下 目 标 的 重 要 前 提 : 无 问 题 的 系 统 集 成 明 确 定 义 的 界 面 统 一 的 模 型 外 观 、 编 码 及 文 件 编 制 可 重 用 模 型 可 读 的 模 型 无 问 题 的 模 型 交 换 简 单 高 效 的 过 程 专 业 的 文 件 编 制 清 晰 易 懂 的 展 示 快 速 的 软 件 变 更 与 分 包 商 的 合 作 将 研 究 或 重 建 项 目 移 交 给 产 品 开 发 2
0 版 的 批 注 本 规 范 的 现 行 版 本3
0 版 支 持MATLAB 算 法 , 包 括 其R2007b 至R2011b 版
0 版 参 考 了 《 美 国 国 家 航空航天局猎户座指南》中的 部分 规 则
参 考 的 规 则均在 “参 见”部 分 中标 明 了 该规 则在 《 美 国 国 家航空航天局猎户座指南》中的编号
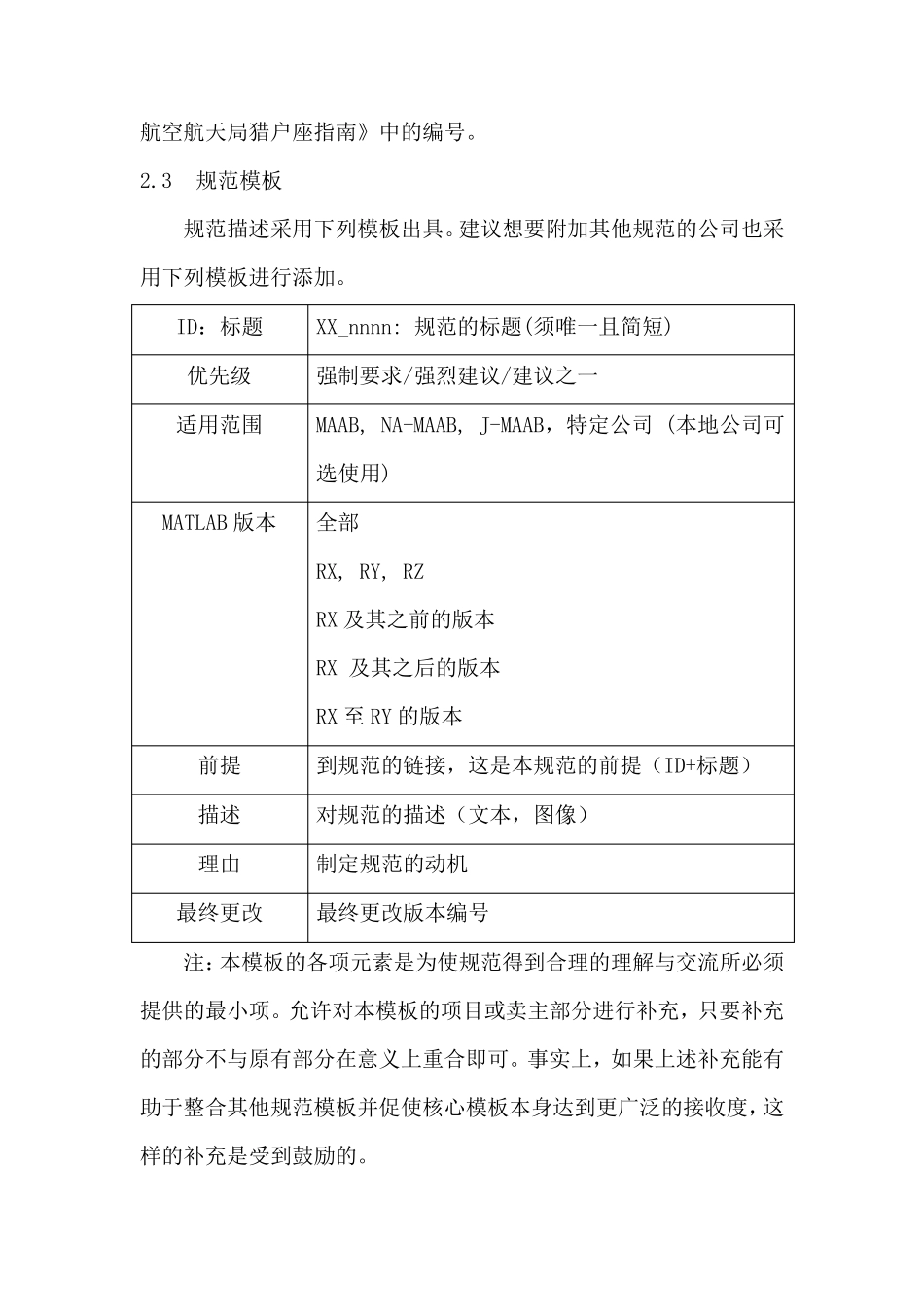
3 规范模板 规范描述采用下列模板出具
建议想要附加其他规范的公司也采用下列模板进行添加
ID:标题 XX_nnnn: 规范的标题(须唯一且简短) 优先