二并联杆数控螺旋面钻头尖刃磨机的机构仿真 一、仿真原理 图 1二并联杆数控螺旋面钻头尖刃磨机床示意图 图 2 二并联杆数控螺旋面钻头尖刃磨机床刃磨原理图 重要假设条件: 1、 二并联杆数控螺旋面钻头尖刃磨机床是通过两组并联杆(2,a 和 3,b)保证动平台 4只在空间中做水平运动,而没有翻转运动
每一组并联杆是由空间相互平行的 4 根杆件组成,由于组内各杆件受力相同,所以将其简化成平面机构如图 2
构件 a,b 是保证动平台 4 只做水平运动的辅助平行杆,所以可以假设将机构中杆件 a,b 省略,而动平台 4只做水平移动,没有翻转运动,也就是 4 相对于地面的夹角θ 4恒等于 0
2、 直线电机的次子有两个(1 和 5)但是在加工过程中并不是两者同时运动,所以假设 5与导轨固联
3、 假设机床在工作过程中动平台 4 只受到树直向上的恒力作用,且作用在其中心位置
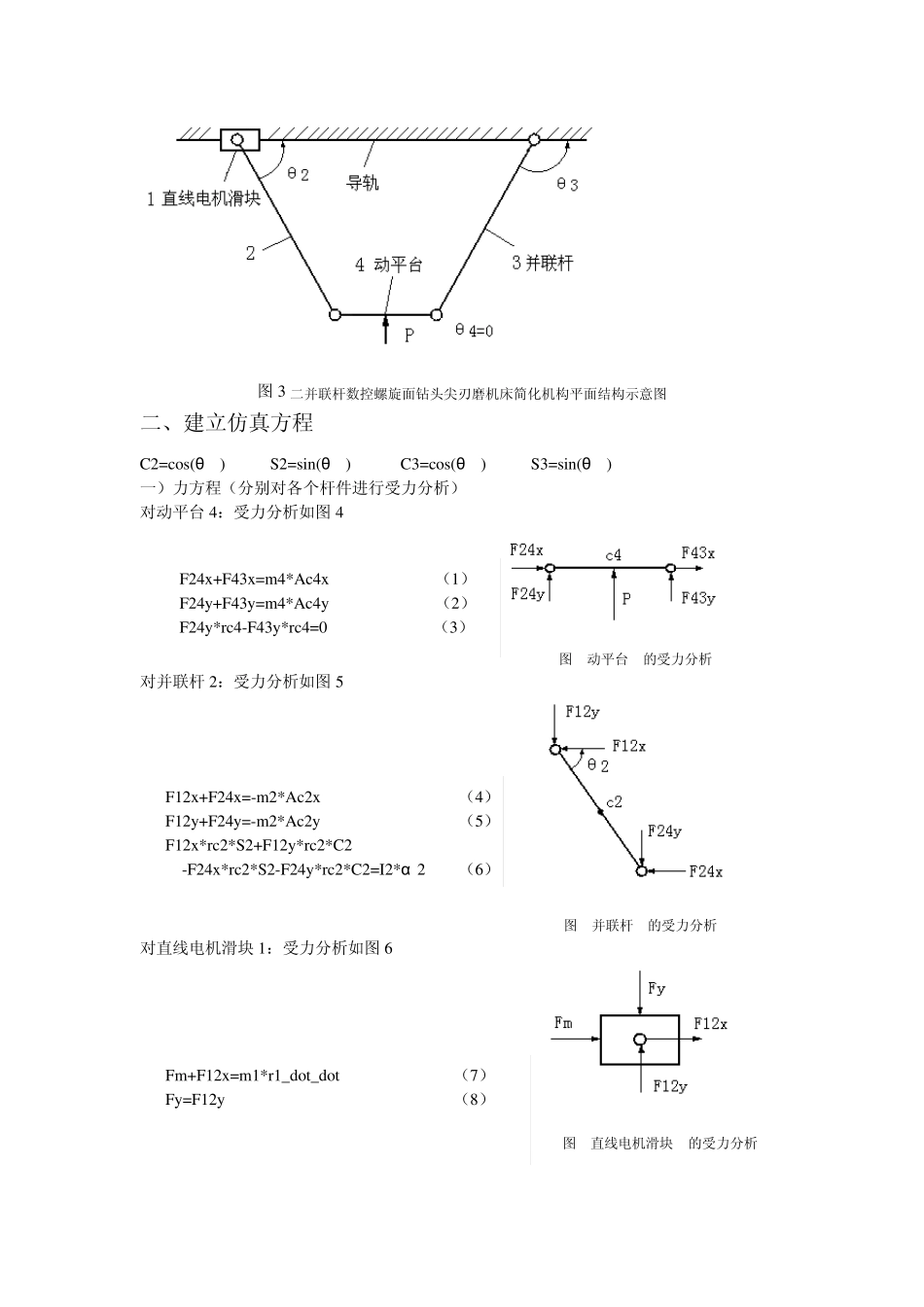
基于以上假设机床平面结构示意图如图 3
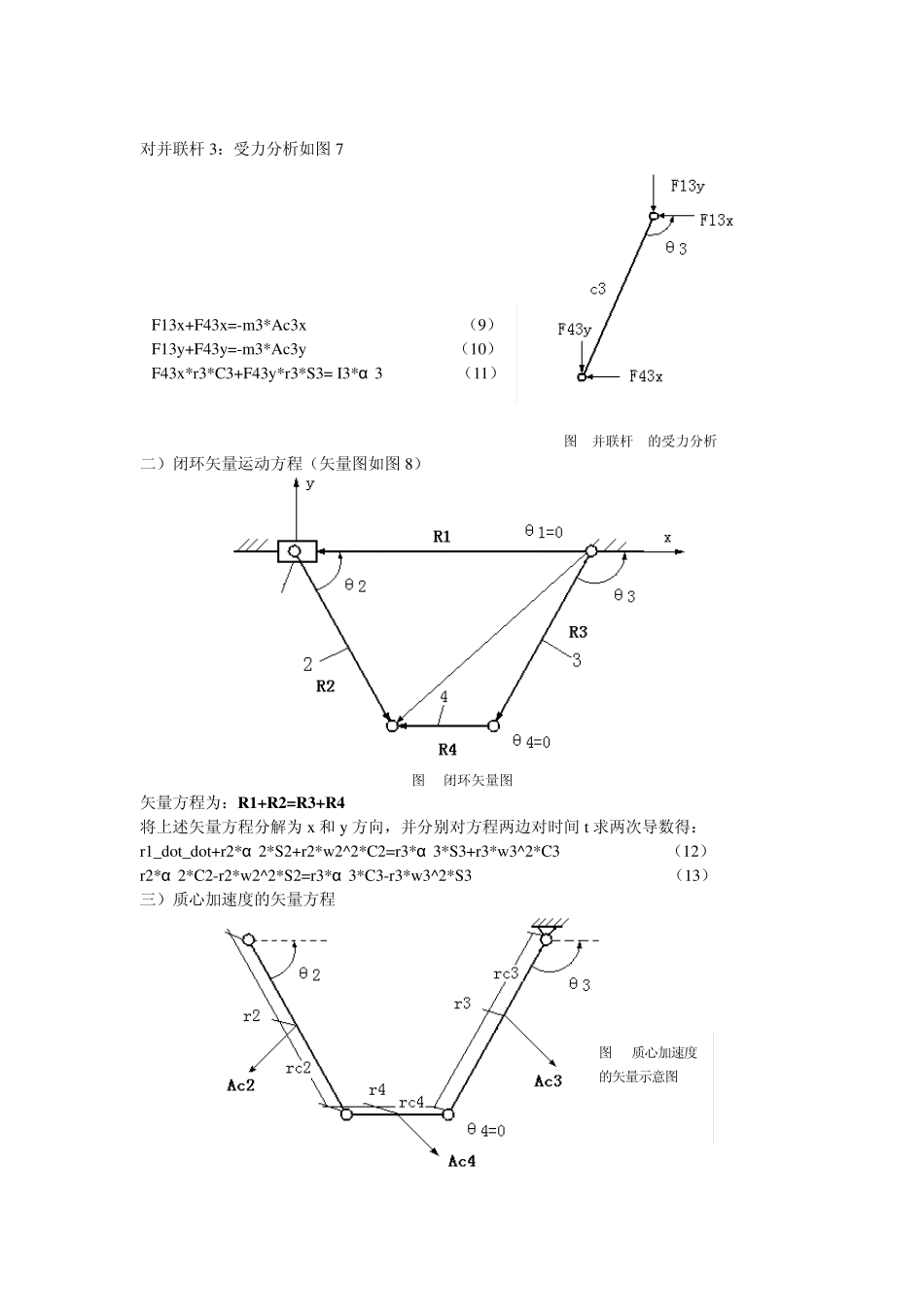
图3 二并联杆数控螺旋面钻头尖刃磨机床简化机构平面结构示意图 二、建立仿真方程 C2=cos(θ 2) S2=sin(θ 2) C3=cos(θ 3) S3=sin(θ 3) 一)力方程(分别对各个杆件进行受力分析) 对动平台 4:受力分析如图4 图4动平台 4的受力分析 对并联杆2:受力分析如图5 图5并联杆2的受力分析 对直线电机滑块 1:受力分析如图6 图6直线电机滑块 1的受力分析 F24x +F43x =m4*Ac4x (1) F24y +F43y =m4*Ac4y (2) F24y *rc4-F43y *rc4=0 (3) F12x +F24x =-m2*Ac2x (4) F12y +F24y =-m2*Ac2y (5) F12x *rc2*S2+F12y *rc2*C2 -F24x *rc2*S2-F24y *rc2*C2=I2*α 2 (6) Fm+F12