- 1 - 小车倒摆模糊系统控制一、简介迄今为止,相当多的模糊神经网络都是结合控制问题,特别是倒摆控制问题提出的
作为智能控制研究中的一个经典对象, 在倒摆问题中应用神经网络方法,首推 Widrow 等人的工作
但较具代表性的结果则主要是由加州大学伯克利分校,以 L
Zadeh 为首的“ fuzzy group ”作出的
1992 年 J
Jang 提出的自适应神经网络模糊控制的方法对于倒摆控制系统这个经典问题又有了极大的发展
下面我们使用基于自适应网络的模糊推理系统ANFIS来研究倒摆的控制问题
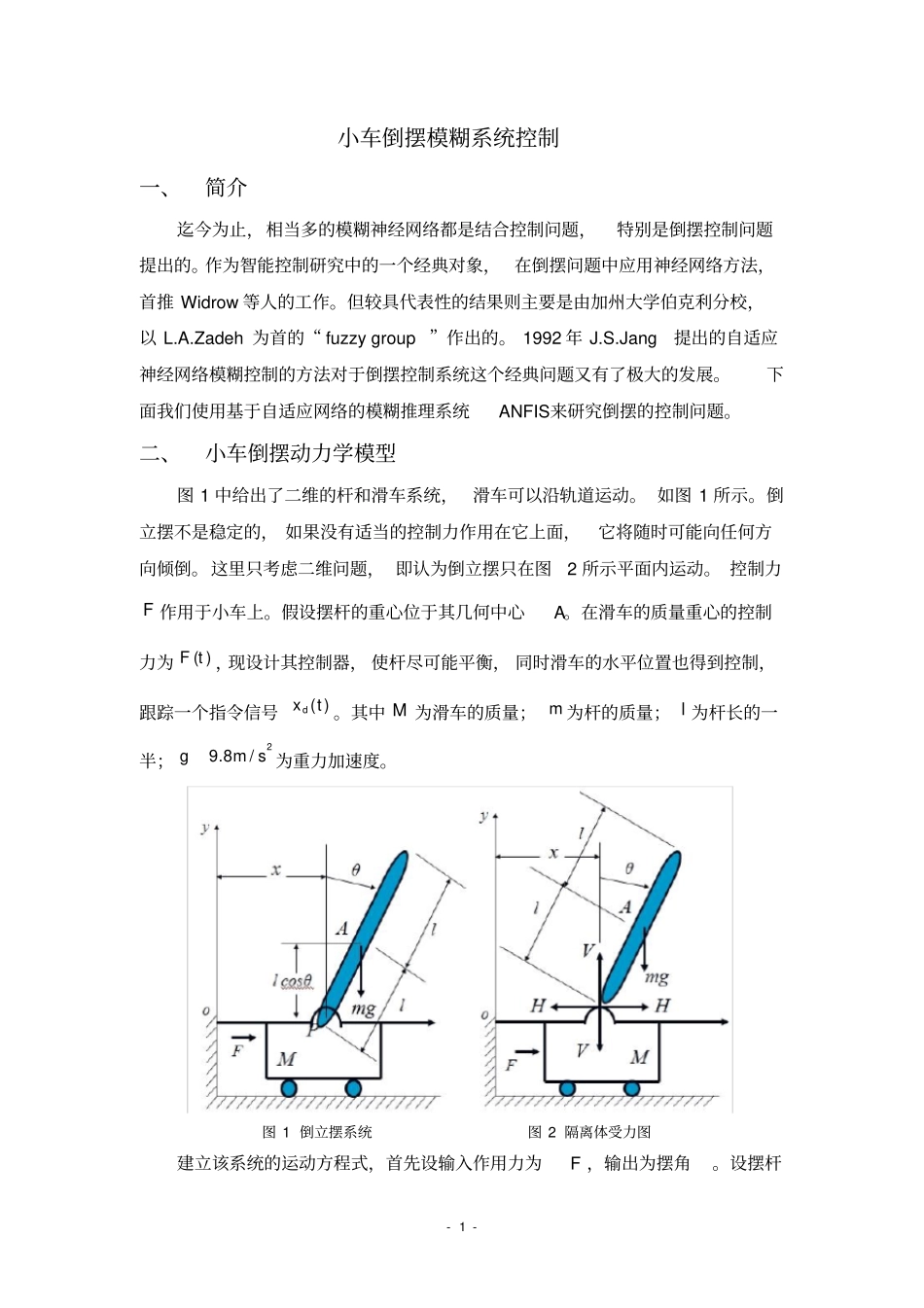
二、小车倒摆动力学模型图 1 中给出了二维的杆和滑车系统,滑车可以沿轨道运动
如图 1 所示
倒立摆不是稳定的, 如果没有适当的控制力作用在它上面,它将随时可能向任何方向倾倒
这里只考虑二维问题, 即认为倒立摆只在图2 所示平面内运动
控制力F 作用于小车上
假设摆杆的重心位于其几何中心A
在滑车的质量重心的控制力为)(tF,现设计其控制器, 使杆尽可能平衡, 同时滑车的水平位置也得到控制,跟踪一个指令信号)(tx d
其中 M 为滑车的质量; m 为杆的质量; l 为杆长的一半;2/8
9smg为重力加速度
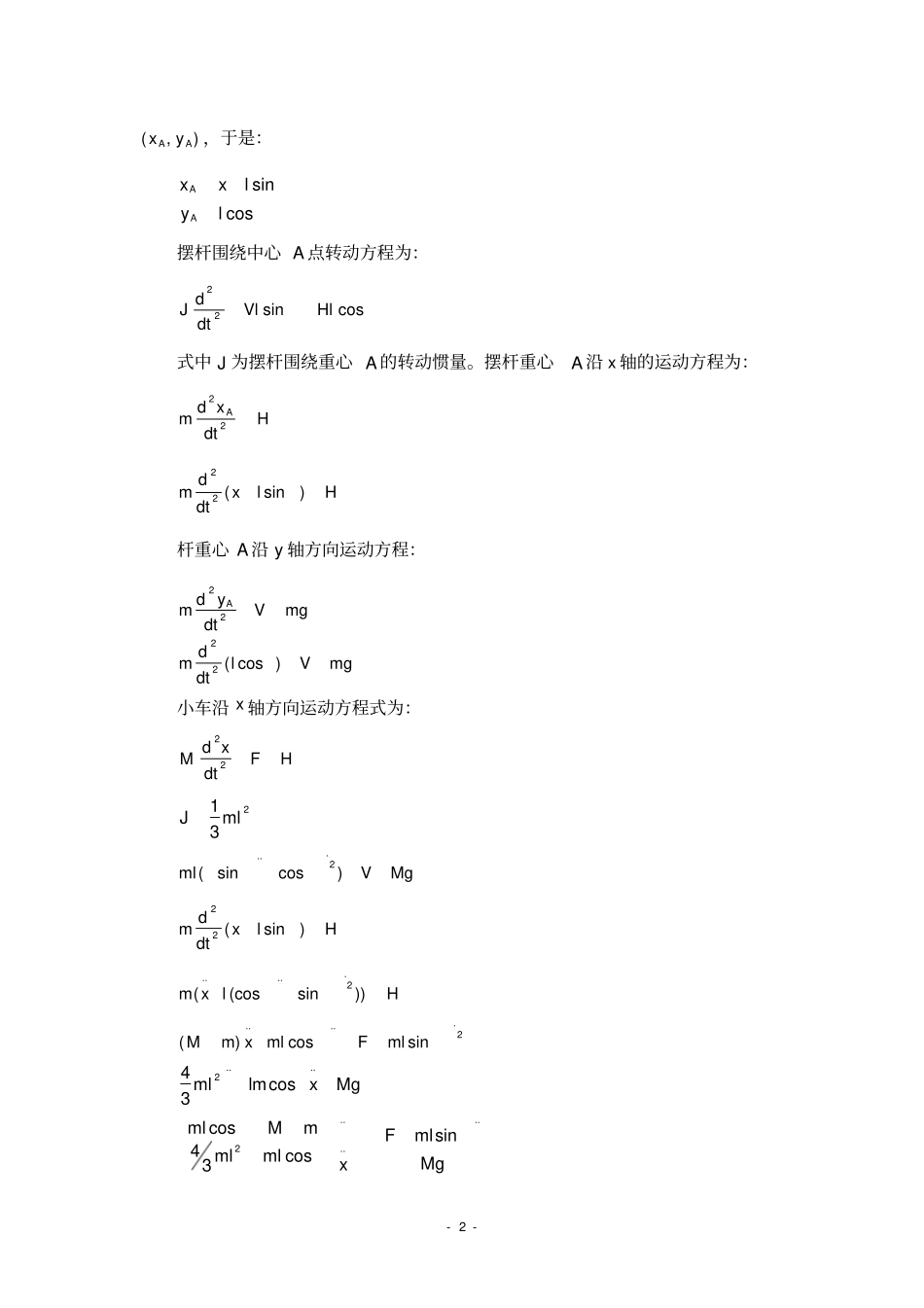
图 1 倒立摆系统图 2 隔离体受力图建立该系统的运动方程式,首先设输入作用力为F ,输出为摆角
设摆杆- 2 - ),(AA yx,于是:cossinlylxxAA摆杆围绕中心 A 点转动方程为:cossin22HlVldtdJ式中 J 为摆杆围绕重心 A 的转动惯量
摆杆重心A 沿 x 轴的运动方程为:HdtxdmA22Hlxdtdm)sin(22杆重心 A 沿 y 轴方向运动方程:mgVldtdmmgVdtydmA)cos(2222小车沿 x 轴方向运动方程式为:HFdtxdM22231 mlJMgVml)cossin(
Hlxdtdm)sin(2