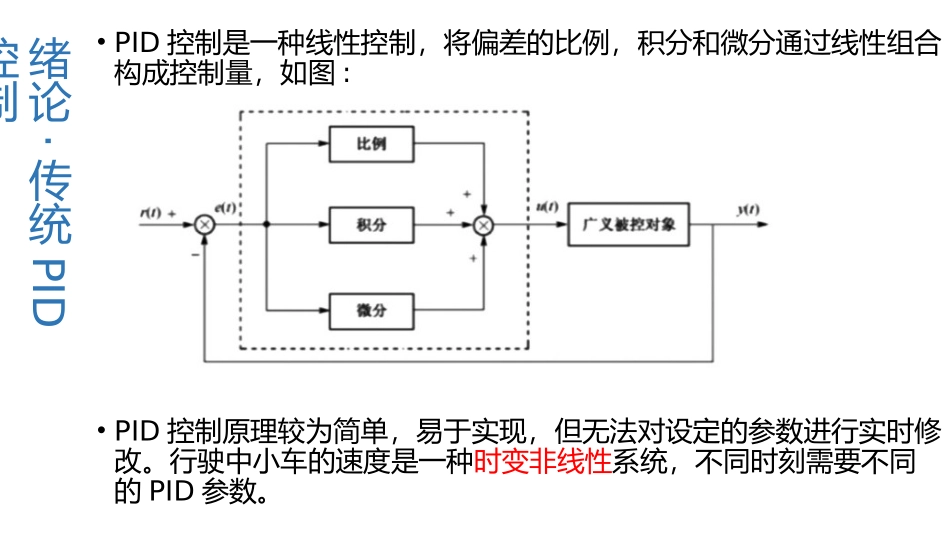
•PID控制是一种线性控制,将偏差的比例,积分和微分通过线性组合构成控制量,如图:•PID控制原理较为简单,易于实现,但无法对设定的参数进行实时修改
行驶中小车的速度是一种时变非线性系统,不同时刻需要不同的PID参数
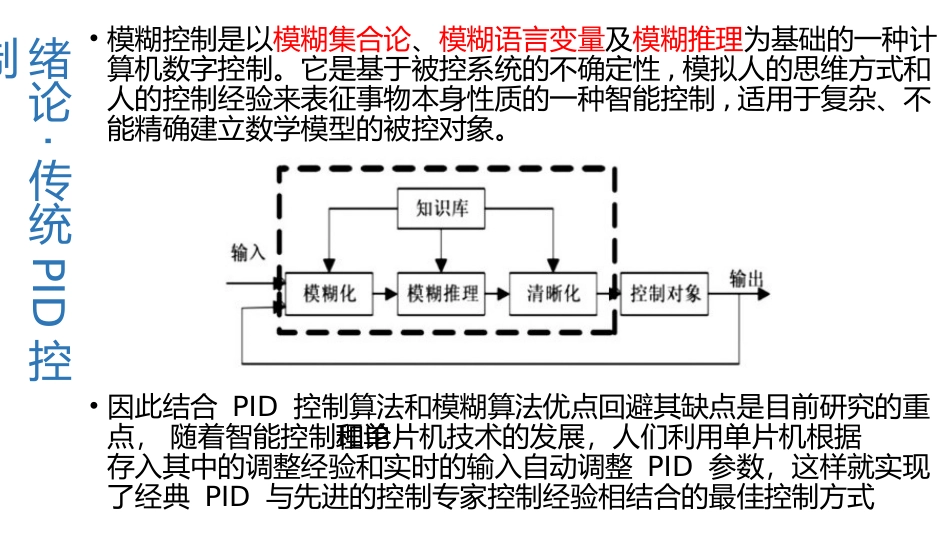
绪论·传统PID控制•模糊控制是以模糊集合论、模糊语言变量及模糊推理为基础的一种计算机数字控制
它是基于被控系统的不确定性,模拟人的思维方式和人的控制经验来表征事物本身性质的一种智能控制,适用于复杂、不能精确建立数学模型的被控对象
•因此结合PID控制算法和模糊算法优点回避其缺点是目前研究的重点,随着智能控制理论和单片机技术的发展,人们利用单片机根据存入其中的调整经验和实时的输入自动调整PID参数,这样就实现了经典PID与先进的控制专家控制经验相结合的最佳控制方式绪论·传统PID控制模糊自适应PID控制原理•通常情况下,将PID三个参数Kp,KT,K
与模糊控制相结合可形成模糊自适应
该控制器工作时选取的两个输入分别是误差e、误差变化率ec,运用模糊控制规则将PID三个参数进行在线调试,并以PID控制器的三个参数的修正量△Kp、△Ki、△Kd作为输出,不断地调整PID控制器中三个参数,达到偏差e和偏差ec对PID参数自整定的目的
模糊自适应PID控制原理•该算法的调试方法:①确定该系统涉及的PID三个参数Kp、Kpi、Kd与系统的偏差e、系统的偏差变化率ec间的模糊关系,②在运行过程中持续更新e和ec的值,与模糊规则库进行匹配实时调整这三个参数,③调整过的参数经增量式PID控制器输出后即可完成对系统的控制
kp、k,、kd是模糊自整定PID控制器的参数,在线运行过程中,控制系统通过对模糊逻辑规则的结果处理、查表和运算可得到调整量△Kp、△Ki、△Kd,通过初始值与调整量的合成完成了其控制参数的调整
算法控制参数校正流程模糊自整定PID控制器的设计•模糊自整定P