履带车辆的转向理论 一、双履带车辆的转向理论 对于双履带式车辆各种转向机构就基本原理来说是相同的,都是依靠改变两侧驱动轮上的驱动力,使其达到不同时速来实现转向的
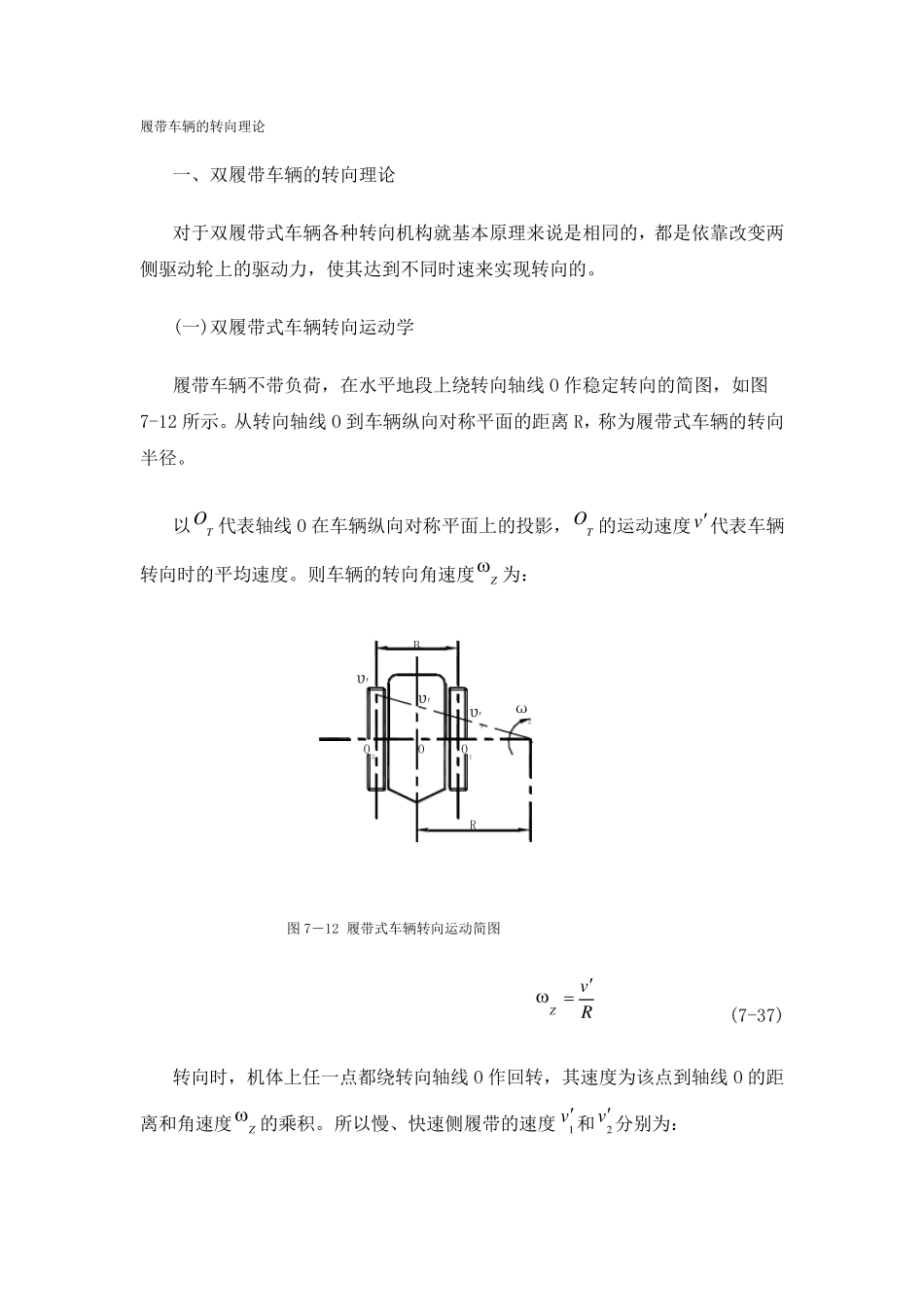
(一)双履带式车辆转向运动学 履带车辆不带负荷,在水平地段上绕转向轴线O 作稳定转向的简图,如图7-12 所示
从转向轴线O 到车辆纵向对称平面的距离R,称为履带式车辆的转向半径
以TO 代表轴线O 在车辆纵向对称平面上的投影,TO 的运动速度v代表车辆转向时的平均速度
则车辆的转向角速度Z 为: 图7-12 履带式车辆转向运动简图 RvZ (7-37) 转向时,机体上任一点都绕转向轴线O 作回转,其速度为该点到轴线O 的距离和角速度Z 的乘积
所以慢、快速侧履带的速度1v和2v 分别为: υO2′2υROυ′O1′1ZωBZZZZBvBRvBvBRv5
0(21 (7-38) 式中:B—履带车辆的轨距
根据相对运动原理,可以将机体上任一点的运动分解成两种运动的合成:(1)牵连运动,;(2)相对运动
由上可得: BRBRvv5
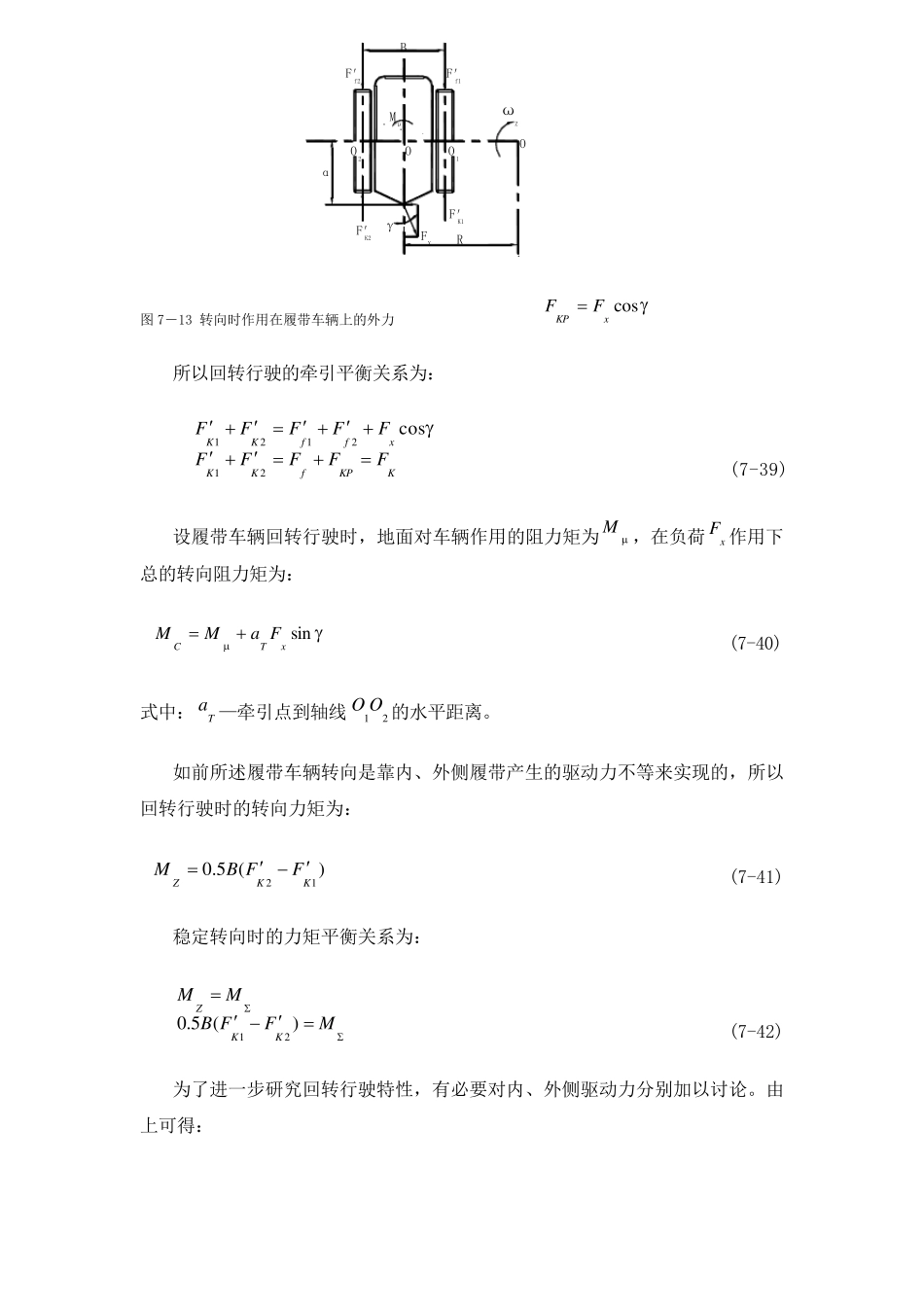
021 (二)双履带式车辆转向动力学 1、牵引平衡和力矩平衡 图 7-13 给出了带有牵引负荷的履带式车辆,在水平地段上以转向半径 R 作低速稳定转向时的受力情况(离心力可略去不计)
转向行驶时的牵引平衡可作两点假设: (1) 在相同地面条件下,转向行驶阻力等于直线行驶阻 力,且两侧履带行驶阻力相等,即: fffFFF5
021 (2)在相同的地面条件和负荷情况下,cosxF相当于直 线行驶的有效牵引力KPF,即: 图7-13 转向时作用在履带车辆上的外力 cosxKPFF 所以回转行驶的牵引平衡关系为: KKPfKKxffKKFFFFFFFFFF212