线性系统的可控性和可观测性可控性和可观测性的概念第三节介绍了系统的稳定性,本节接着介绍系统另外两个重要特性,即系统的可控性和可观测性,这两个特性是经典控制理论所没有的
在用传递函数描述的经典控制系统中,输出量一般是可控的和可以被测量的,因而不需要特别地提及可控性及可观测性的概念
现代控制理论用状态方程和输出方程描述系统,输出和输入构成系统的外部变量,而状态为系统的内部变量, 系统就好比是一块集成电路芯片,内部结构可能十分复杂,物理量很多,而外部只有少数几个引脚,对电路内部物理量的控制和观测都只能通过这为数不多的几个引脚进行
这就存在着系统内的所有状态是否都受输入控制和所有状态是否都可以从输出反映出来的问题, 这就是可控性和可观测性问题
如果系统所有状态变量的运动都可以通过有限的控制点的输入来使其由任意的初态达到任意设定的终态,则称系统是可控的,更确切的说是状态可控的;否则,就称系统是不完全可控的,简称为系统不可控
相应地,如果系统所有的状态变量任意形式的运动均可由有限测量点的输出完全确定出来,则称系统是可观测的,简称为系统可观测;反之,则称系统是不完全可观测的,简称为系统不可观测
可控性与可观测性的概念,是用状态空间描述系统引伸出来的新概念,在现代控制理论中起着重要的作用
可控性、可观测性与稳定性是现代控制系统的三大基本特性
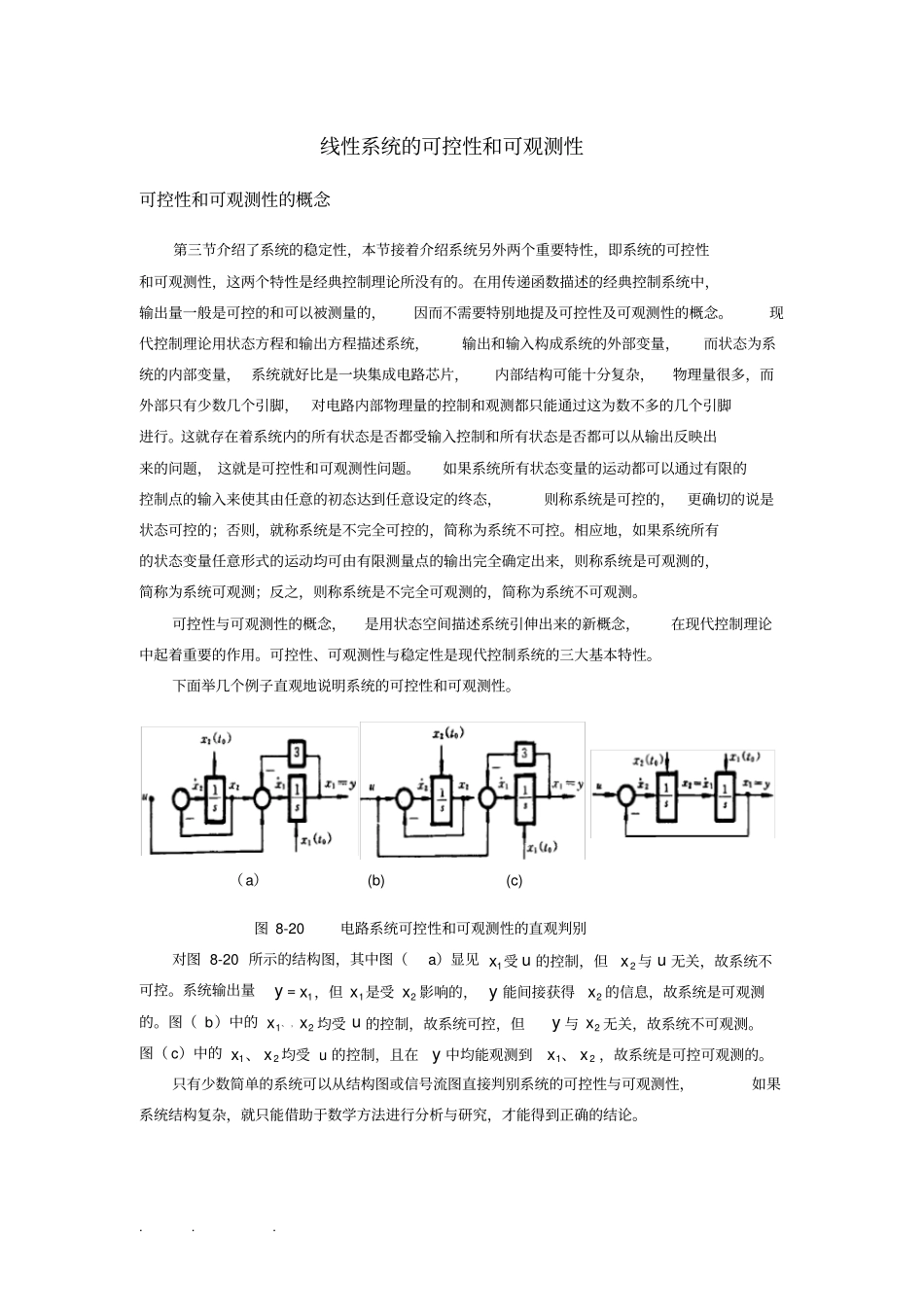
下面举几个例子直观地说明系统的可控性和可观测性
(a) (b) (c) 图 8-20 电路系统可控性和可观测性的直观判别对图 8-20 所示的结构图,其中图(a)显见1x 受 u 的控制,但2x 与 u 无关,故系统不可控
系统输出量y =1x ,但1x 是受2x 影响的, y 能间接获得2x 的信息,故系统是可观测的
图( b)中的1x、 ,2x 均受 u 的控制,故系统可控,但y 与2x 无关,故系统不可观测
图( c)中的1x 、2x