1 基于Matlab/Simulink 异步电机矢量控制系统仿真 一. 理论基础 矢量控制系统的基本思路是以产生相同的旋转磁动势为准则,将异步电动机在静止三相坐标系上的定子交流电流通过坐标变换等效成同步旋转坐标系上的直流电流,并分别加以控制,从而实现磁通和转矩的解耦控制,以达到直流电机的控制效果
所谓矢量控制,就是通过矢量变换和按转子磁链定向,得到等效直流电动机模型,在按转子磁链定向坐标系中,用直流电动机的方法控制电磁转矩与磁链,然后将转子磁链定向坐标系中的控制量经变换得到三相坐标系的对应量,以实施控制
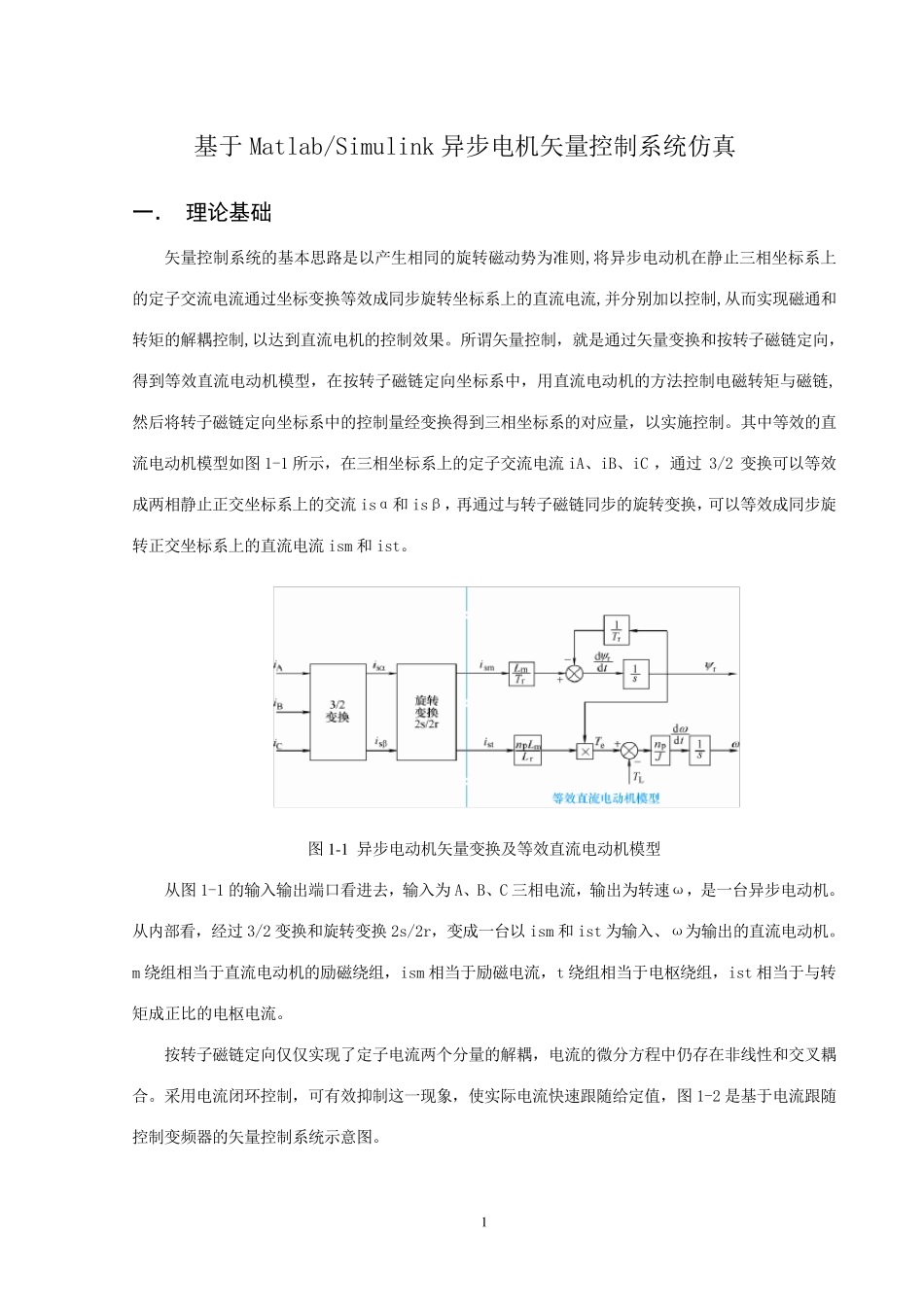
其中等效的直流电动机模型如图1-1 所示,在三相坐标系上的定子交流电流iA、iB、iC ,通过3/2 变换可以等效成两相静止正交坐标系上的交流isα和isβ,再通过与转子磁链同步的旋转变换,可以等效成同步旋转正交坐标系上的直流电流ism 和ist
图1 -1 异步电动机矢量变换及等效直流电动机模型 从图1-1 的输入输出端口看进去,输入为A、B、C 三相电流,输出为转速ω,是一台异步电动机
从内部看,经过3/2 变换和旋转变换2s/2r,变成一台以ism 和ist 为输入、ω为输出的直流电动机
m 绕组相当于直流电动机的励磁绕组,ism 相当于励磁电流,t 绕组相当于电枢绕组,ist 相当于与转矩成正比的电枢电流
按转子磁链定向仅仅实现了定子电流两个分量的解耦,电流的微分方程中仍存在非线性和交叉耦合
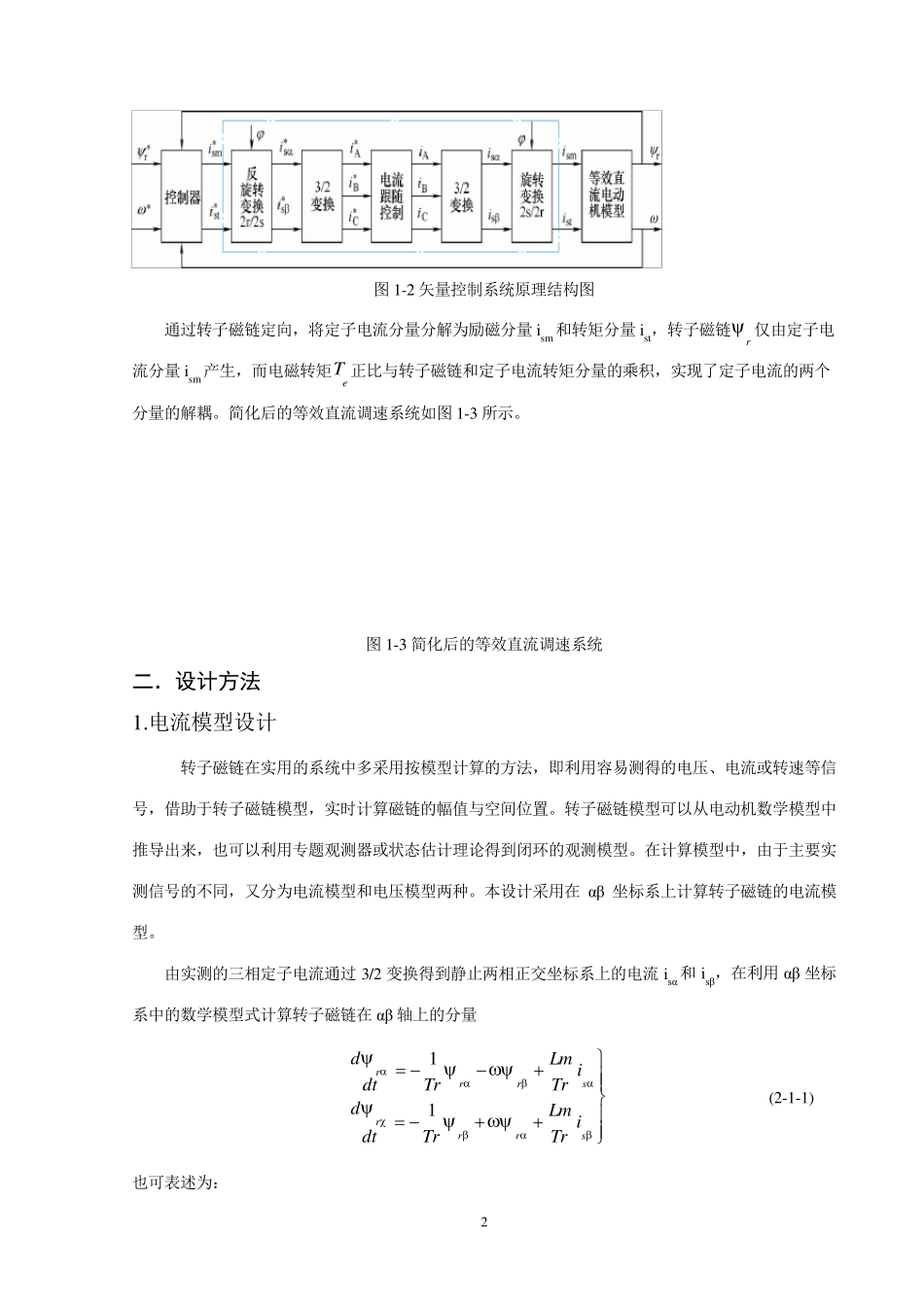
采用电流闭环控制,可有效抑制这一现象,使实际电流快速跟随给定值,图1-2 是基于电流跟随控制变频器的矢量控制系统示意图
2 图1-2 矢量控制系统原理结构图 通过转子磁链定向,将定子电流分量分解为励磁分量ism和转矩分量ist,转子磁链r 仅由定子电流分量ism产生,而电磁转矩eT 正比与转子磁链和定子电流转矩分量的乘积,实现了定子电流的两个分量的解耦
简化后的等效直流