Abstract— Nowadays model-based fault detection and isolation (FDI) systems have become a crucial step towards autonomy in aerospace engineering
However few publications consider FDI applications to unmanned air vehicles (UAV) where full-autonomy is obligatory
In this paper we demonstrate a sensor fault detection and accommodation (SFDA) system, which makes use of analytical redundancy between flight parameters, on a UAV model
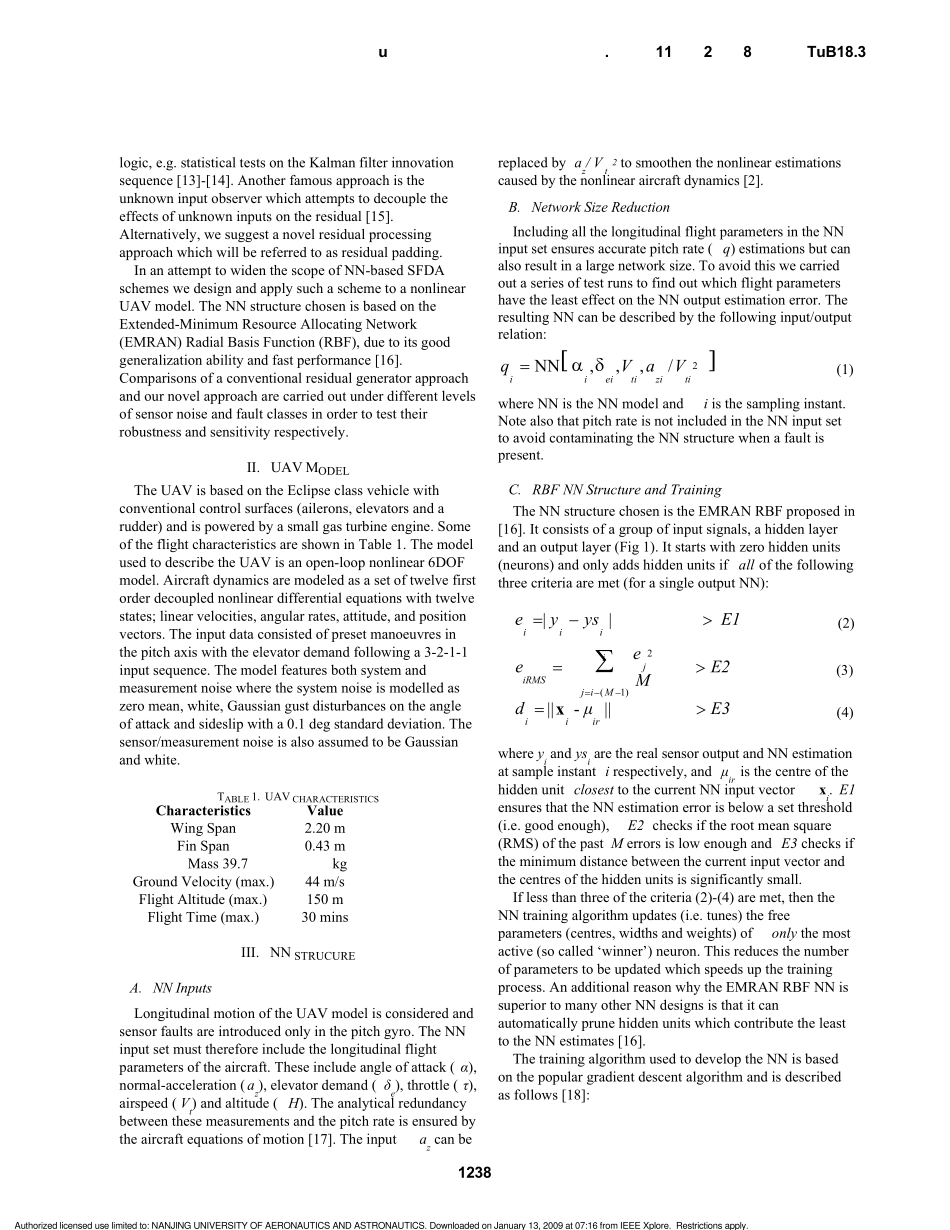
A Radial-Basis Function (RBF) neural network (NN) trained online with Extended Minimum Resource Allocating Network (EMRAN) algorithms is chosen for modelling purposes due to its ability to adapt well to nonlinear environments while maintaining high computational speeds
Furthermore, in an attempt to reduce false alarms (FA) and missed faults (MF) in current SFDA sy