台达PID指令的介绍一
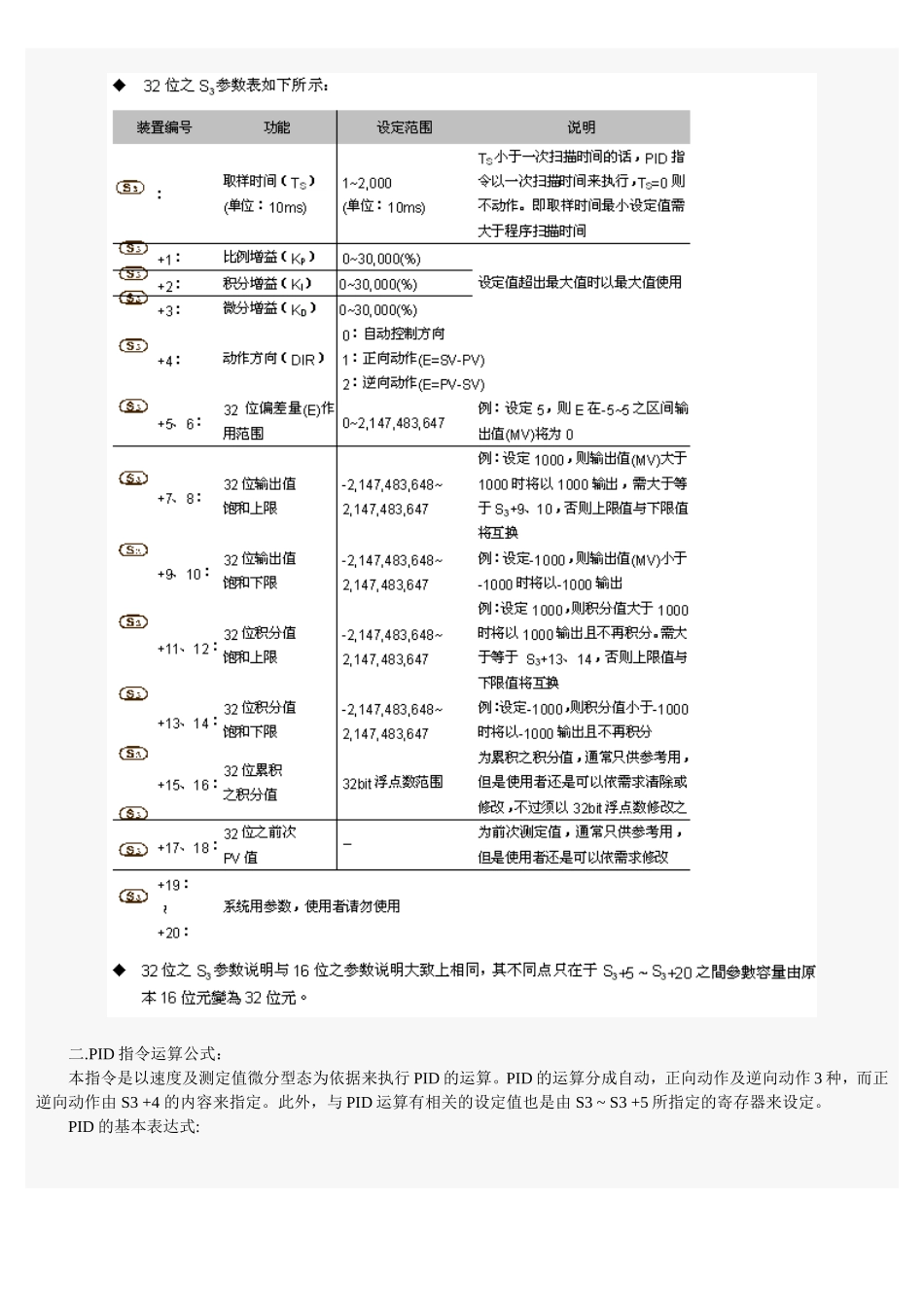
指令说明:PIDS1S2S3DS1:目标值(SV)S2:测定值(PV)S3:参数D:输出值(MV)16位指令名称为PID32位指令名称为DPID其16位之S3参数表如下所示:其32位之S3参数表如下所示:二
PID指令运算公式:本指令是以速度及测定值微分型态为依据来执行PID的运算
PID的运算分成自动,正向动作及逆向动作3种,而正逆向动作由S3+4的内容来指定
此外,与PID运算有相关的设定值也是由S3~S3+5所指定的寄存器来设定
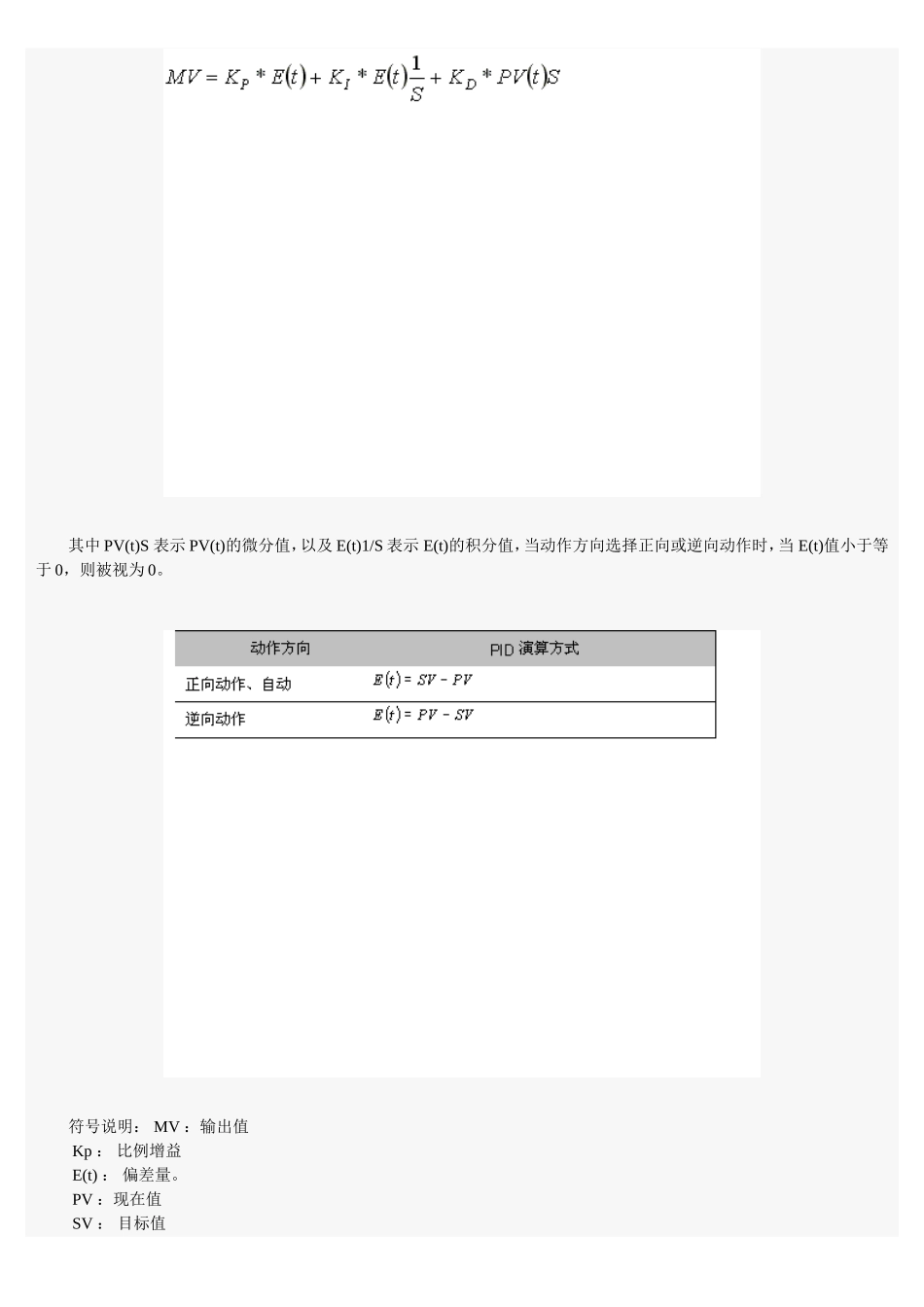
PID的基本表达式:其中PV(t)S表示PV(t)的微分值,以及E(t)1/S表示E(t)的积分值,当动作方向选择正向或逆向动作时,当E(t)值小于等于0,则被视为0
符号说明:MV:输出值Kp:比例增益E(t):偏差量
PV:现在值SV:目标值Kd:微分增益PV(t)S:PV(t)的微分值Ki:积分增益E(t)1/S:E(t)的积分三
控制方块图:注意事项和建议:1
使用者于调整KP、KI及KD三个主要参数时,请先调整KP值(依经验值设定),而KI及KD值先设定为0,等到调整到大致上可控制时,再依序调整KI值(由小到大)以及KD值(由小到大),调整范例如范例四所示
其中KP值为100则表示100%,即对偏差值的增益为1,小于100%将对偏差值衰减,大于100%将对偏差值放大
本指令动作须配合许多参数值控制,因此请勿随意设定参数值,以免造成无法控制之现象
范例一:使用PID指令于位置控制时之方块图(动作方向S3+4需设为0)范例二:使用PID指令于速度控制时之方块图(动作方向S3+4需设为0)范例三:使用PID指令于温度控制时之方块图(动作方向S3+4需设为1)四
PID指令调整步骤说明:假设控制系统之受控体G(s)的转移函数为一阶的函数(一般马达的模型均为此函数),命令值SV为1,取样时间Ts为10ms