现场总线控制系统第5章、CAN总线通信技术5
1CAN的发展概况现代社会对汽车的要求不断提高,这些要求包括:极高的主动安全性和被动安全性;乘坐的舒适性;驾驶与使用的便捷和人性化;尤其是低排放和低油耗的要求等
在汽车设计中运用微处理器及其电控技术是满足这些要求的最好方法,而且已经得到了广泛的运用
目前这些系统有:ABS(防抱系统)、EBD(制动力分配系统)、EMS(发动机管理系统)、多功能数字化仪表、主动悬架、导航系统、电子防盗系统、自动空调和自动CD机等
1CAN的发展概况这些系统由多个电控单元相互连接而成,可分为控制器、传感器、执行器等
同时各个系统之间也互相连接,进行着越来越多的数据交换
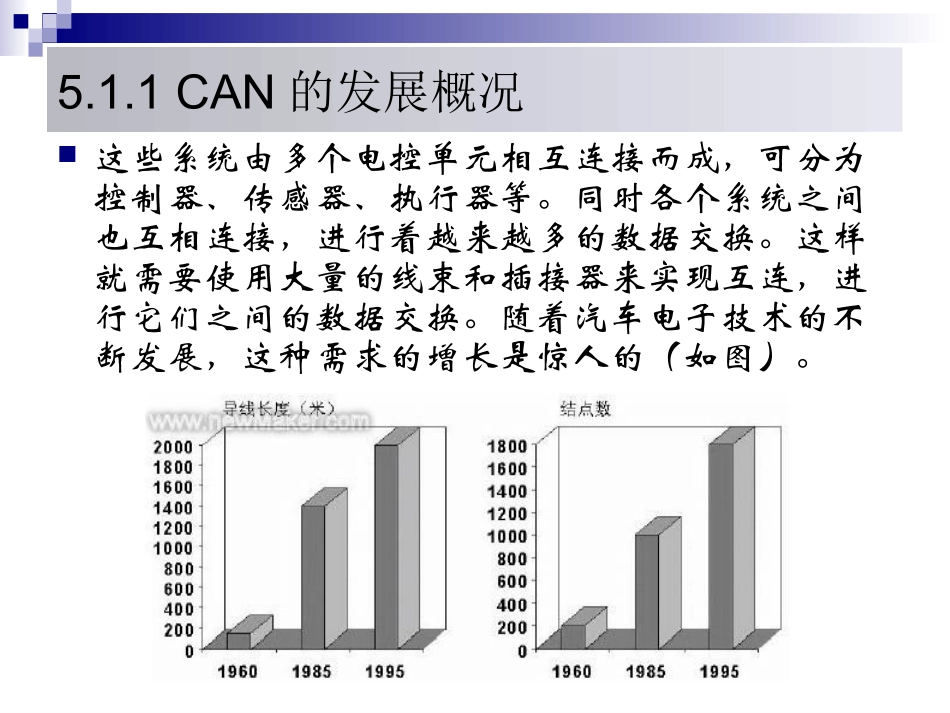
这样就需要使用大量的线束和插接器来实现互连,进行它们之间的数据交换
随着汽车电子技术的不断发展,这种需求的增长是惊人的(如图)
1CAN的发展概况由于线束和插接器的数量不断增加,整车电子系统的复杂程度愈来愈高,其可靠性将难以保证,故障率会提高,维修会更加困难
为了满足汽车内部信息交换量急剧增加的要求,有必要使用一种实现多路传输方式的车载网络系统
这种网络系统采用串行总线结构,通过总线信道共享,减少线束的数量
车载网络除了要求采用总线拓扑结构方式外,必须具有极好的抗干扰能力;极强的差错检测和处理能力;满足信息传输实时性要求;同时具备故障的诊断和处理能力等
另外考虑到成本因素,要求其控制接口结构简单,易于配置
1CAN的发展概况20世纪80年代,Bosch的工程人员开始研究用于汽车的串行总线系统,因为当时还没有一个网络协议能完全满足汽车工程的要求
参加研究的还有Mercedes-Benz公司、Intel公司,还有德国两所大学的教授
1986年,Bosch在SAE(汽车工程人员协会)大会上提出了CAN1987年,INTEL就推出了第一片