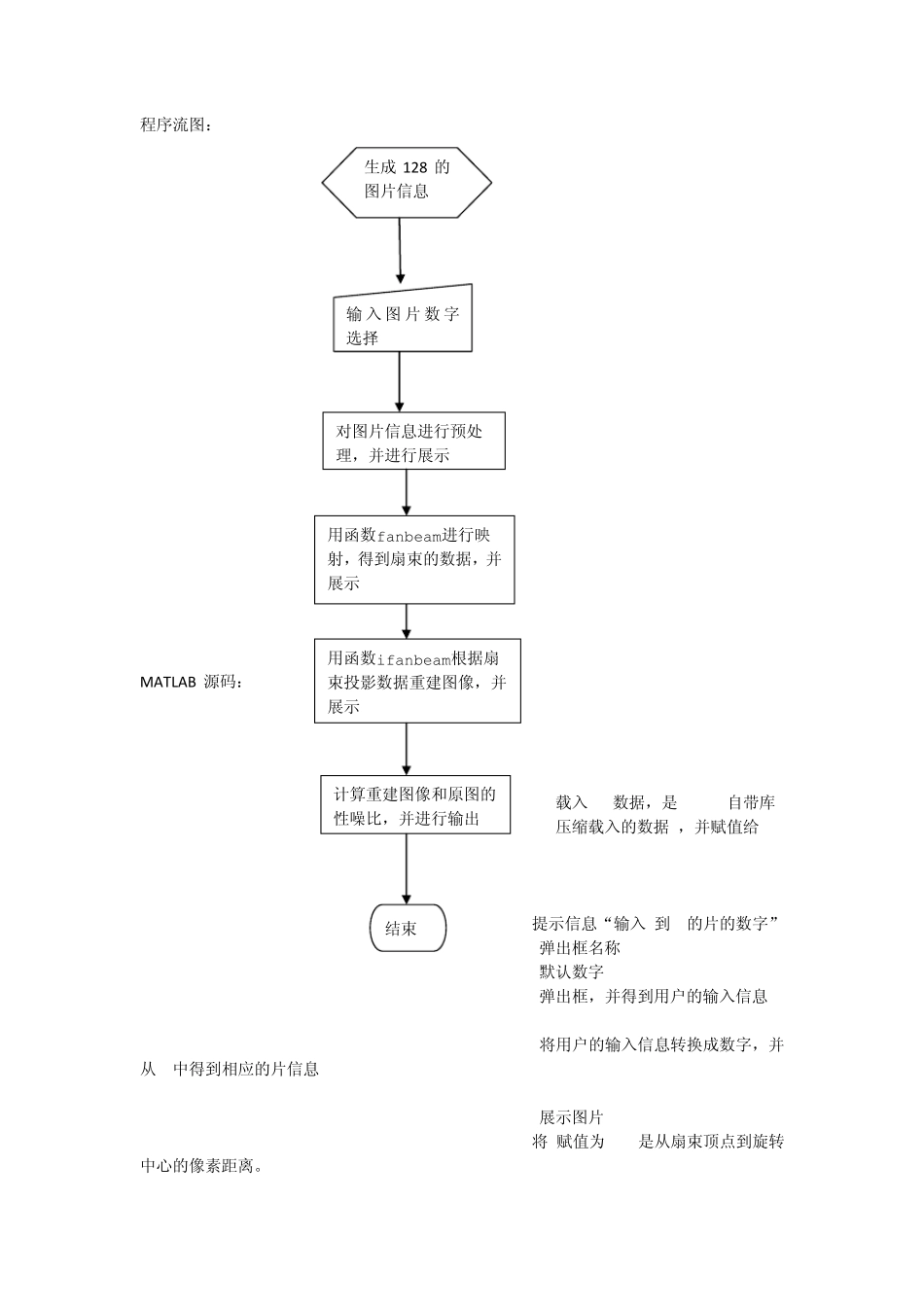
程序流图: MATLAB 源码: clc; clear all; close all; % load mri %载入mri数据,是matlab自带库 % ph = squeeze(D); %压缩载入的数据D,并赋值给ph ph = phantom3d(128); prompt={'Enter the Piece num(1 to 128):'}; %提示信息“输入1到27的片的数字” name='Input number'; %弹出框名称 defaultanswer={'1'}; %默认数字 numInput=inputdlg(prompt,name,1,defaultanswer) %弹出框,并得到用户的输入信息 P= squeeze(ph(:,:,str2num(cell2mat(numInput))));%将用户的输入信息转换成数字,并从ph中得到相应的片信息P imshow(P) %展示图片P D = 250; %将D赋值为250,是从扇束顶点到旋转中心的像素距离
生成 128 的图片信息 输 入图片 数字选择 对图片信息进行预处理,并进行展示 用函数fanbeam进行映射,得到扇束的数据,并展示 用函数ifanbeam根据扇束投影数据重建图像,并展示 计算重建图像和原图的性噪比,并进行输出 结束 dsensor1 = 2; %正实数指定扇束传感器的间距2 F1 = fanbeam(P,D,'FanSensorSpacing',dsensor1); %通过P,D等计算扇束的数据值 dsensor2 = 1; %正实数指定扇束传感器的间距1 F2 = fanbeam(P,D,'FanSensorSpacing',dsensor2); %通过P,D等计算扇束的数据值 d