下载后可任意编辑RAPID 程序指台与功能 ABB 机器人提供了丰富的 RAPID 程序指令,方便了大家对程序的编制,同时也为复杂应用的实现提供了可能
以下就根据 RAPID 程序指令、功能的用途进行了一个分类,并对每个指令的功能作一个说明,如需对指令的使用与参数进行详细的了解,可以查看 ABB 机器人随机光盘说明书中的详细说明
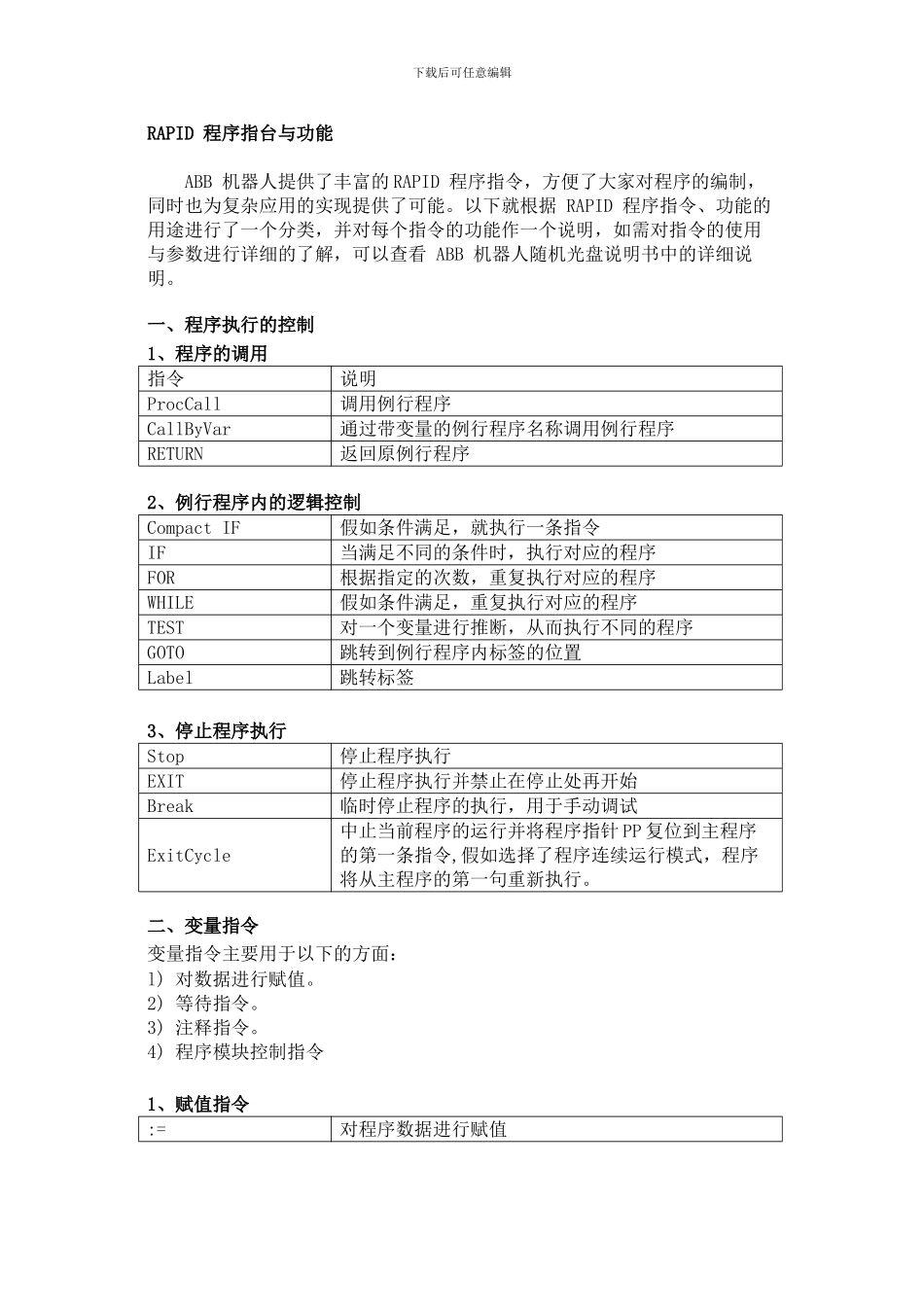
一、程序执行的控制1、程序的调用指令 说明ProcCall调用例行程序CallByVar通过带变量的例行程序名称调用例行程序RETURN返回原例行程序2、例行程序内的逻辑控制 Compact IF假如条件满足,就执行一条指令IF当满足不同的条件时,执行对应的程序FOR根据指定的次数,重复执行对应的程序WHILE假如条件满足,重复执行对应的程序TEST对一个变量进行推断,从而执行不同的程序GOTO跳转到例行程序内标签的位置Label跳转标签3、停止程序执行 Stop停止程序执行EXIT停止程序执行并禁止在停止处再开始Break临时停止程序的执行,用于手动调试ExitCycle中止当前程序的运行并将程序指针 PP 复位到主程序的第一条指令,假如选择了程序连续运行模式,程序将从主程序的第一句重新执行
二、变量指令变量指令主要用于以下的方面:l) 对数据进行赋值
2) 等待指令
3) 注释指令
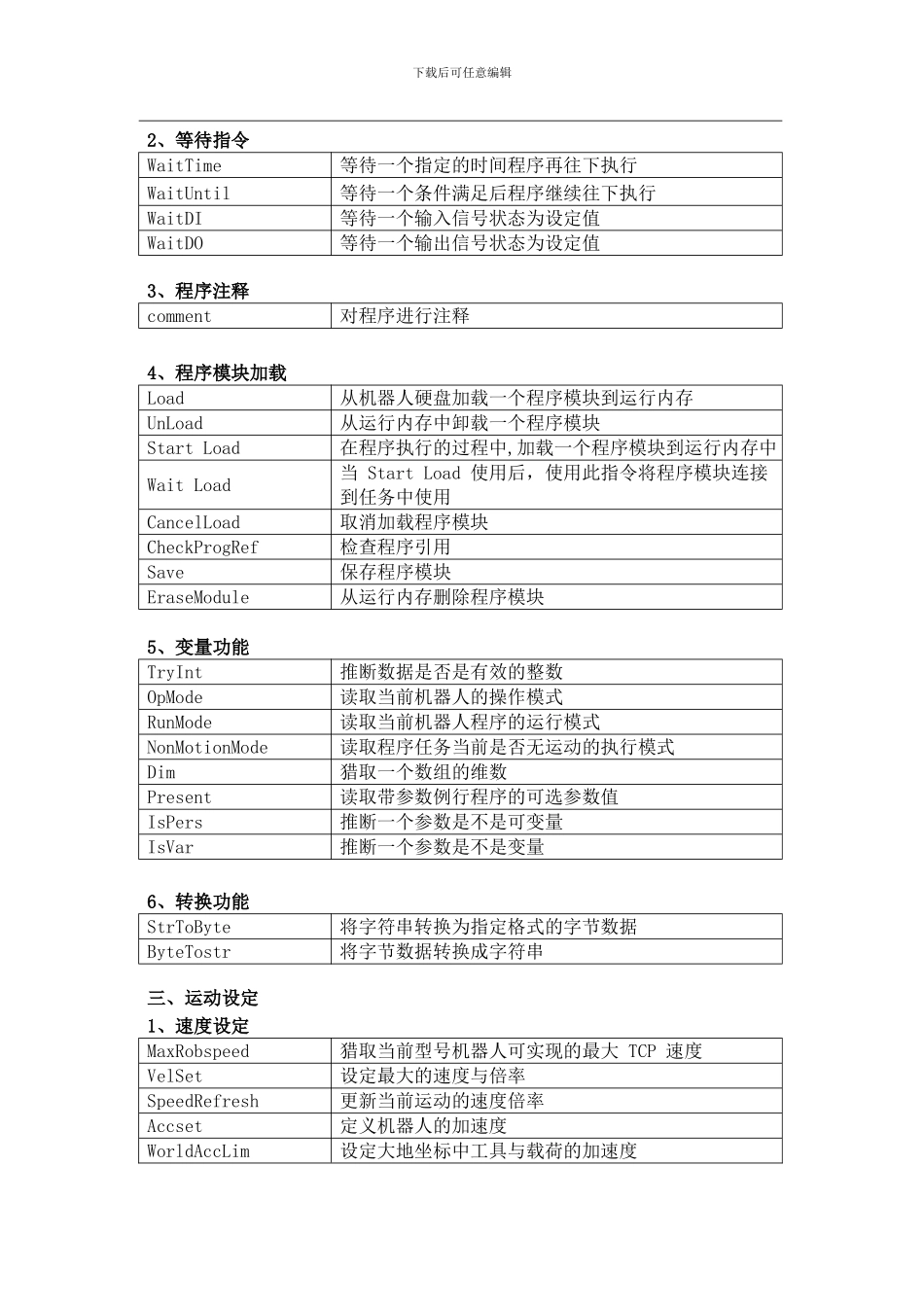
4) 程序模块控制指令1、赋值指令 :=对程序数据进行赋值下载后可任意编辑2、等待指令 WaitTime等待一个指定的时间程序再往下执行WaitUntil等待一个条件满足后程序继续往下执行WaitDI等待一个输入信号状态为设定值WaitDO等待一个输出信号状态为设定值3、程序注释comment对程序进行注释4、程序模块加载 Load从机器人硬盘加载一个程序模块到运行内存UnLoad从运行内存中卸载一个程序模块Start Load在程序执行的过程中,加载一个程序模块