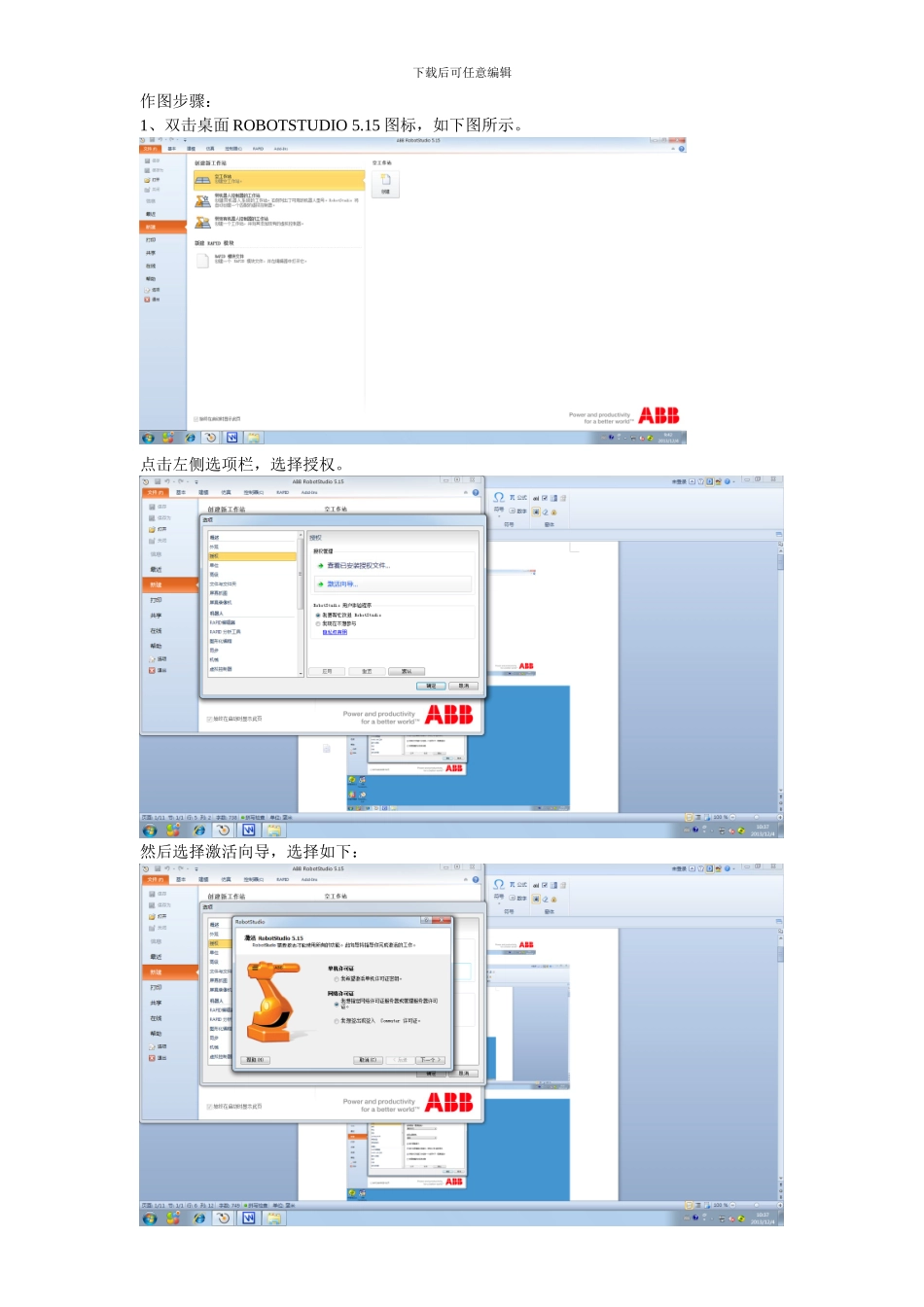
下载后可任意编辑作图步骤:1、双击桌面 ROBOTSTUDIO 5
15 图标,如下图所示
点击左侧选项栏,选择授权
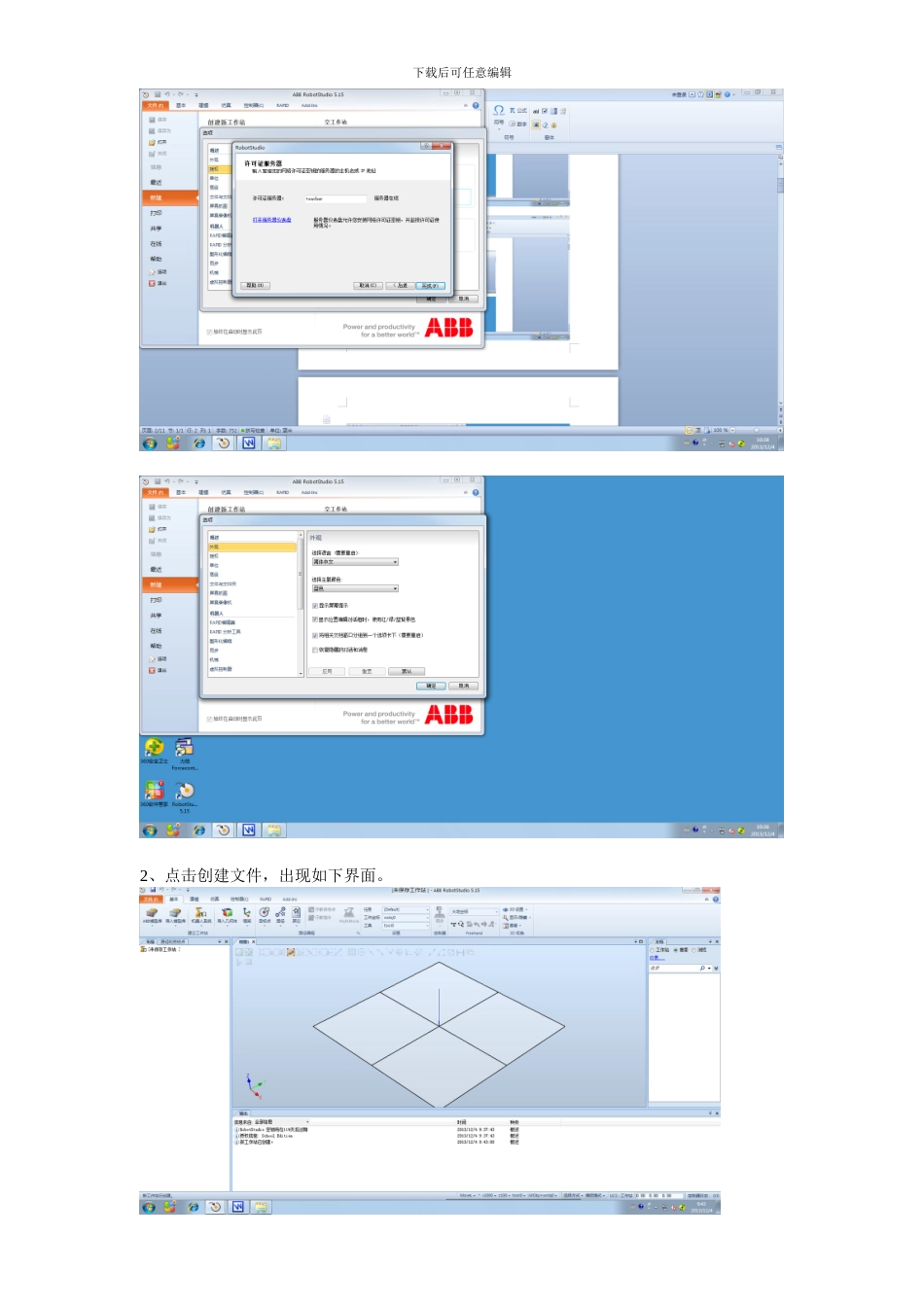
然后选择激活向导,选择如下:下载后可任意编辑2、点击创建文件,出现如下界面
下载后可任意编辑3、选择机器人模型,点击 ABB 模型库,出现如下界面,选择 IRB2600
把承重能力改为20KG
4、然 后 点 击 导 入 模 型 库 , 下 拖 选 择 MYTOOL 后 , 然 后 把 左 侧 边 mytool 工 具 拖 到IRB2600-20-165-01,机器人上自动安装了喷头工具
下载后可任意编辑5、然后点击机器人系统菜单,选择从布局创建系统
在此项目中,可以在名称处修改系统的名称,尤其在系统多的情况下
在主菜单中,一定要修改工具,把原始的 tool10 改为 mytool
或者,在放入机器人时,即完成此项设置,可以不需要修改此项
下载后可任意编辑一直选择下一个,即可成功
成功后,屏幕右下角变为绿色
5、选择建模,在菜单中选择固体,再选择矩形体
下载后可任意编辑6、选择矩形体后,设置矩形体的长宽高参数为 400、500、400 后,点击创建,后关闭,即可在屏幕上看到矩形体
下载后可任意编辑在此项中选择左侧布局后,双击部件 1,修改名称为 box
7、点击菜单中大地坐标中的移动,即可移动矩形体
此项中一定要注意看俯视图,使正方体在机器人运动范围内,否则出错
8、点击基本菜单中的路径
下载后可任意编辑一种路径就设置为 PATH10,假如有其他,就要多设置几个路径
后选择捕捉末端和手动线性,并把屏幕右下方的几个参数设置为 MOVEJ,V300,Z 为fine,准备设置示教指令
9、做 6 个示教指令,第一个和最后一个为 MOVEJ,其他都为 MOVEL
每移动一个点,点一次示教指令
10、设置完示教指令后,点击基本菜单下同步,选择同步到 VC下载后可任意编