机械设计基础(第二版) 部分习题参考答案 第2章 2-1 答:两构件之间直接接触并能产生一定相对运动的连接称为运动副
平面高副是以点火线相接触,其接触部分的压强较高,易磨损
平面低副是面接触,受载时压强较低,磨损较轻,也便于润滑
2-2 答:机构具有确定运动的条件是:机构中的原动件数等于机构的自由度数
2-3 答:计算机构的自由度时要注意处理好三个关键问题,即复合铰链、局部自由度、虚约束
2-4 答:虚约束是指机构中与其它约束重复而对机构运动不起新的限制作用的约束
而局部自由度是指机构中某些构件的局部运动不影响其它构件的运动,对整个机构的自由度不产生影响,这种局面运动的自由度称为局部自由度
说虚约束是不存在的约束,局部自由度是不存在的自由度是不正确的,它们都是实实在在存在的,构件对构件的受力,运动等方面起着重要的作用
2-5 答:用规定的线条和符号表示构件和运动副,对分析和研究机构的运动件性,起到一个简明直观的效果
绘制机构运动简图时,对机构的观察、分析很重要,首先要明确三类构件:固定构件(机架)、原动件、从动件;其次,要弄清构件数量和运动副类型;最后按规定符号和先取比例绘图
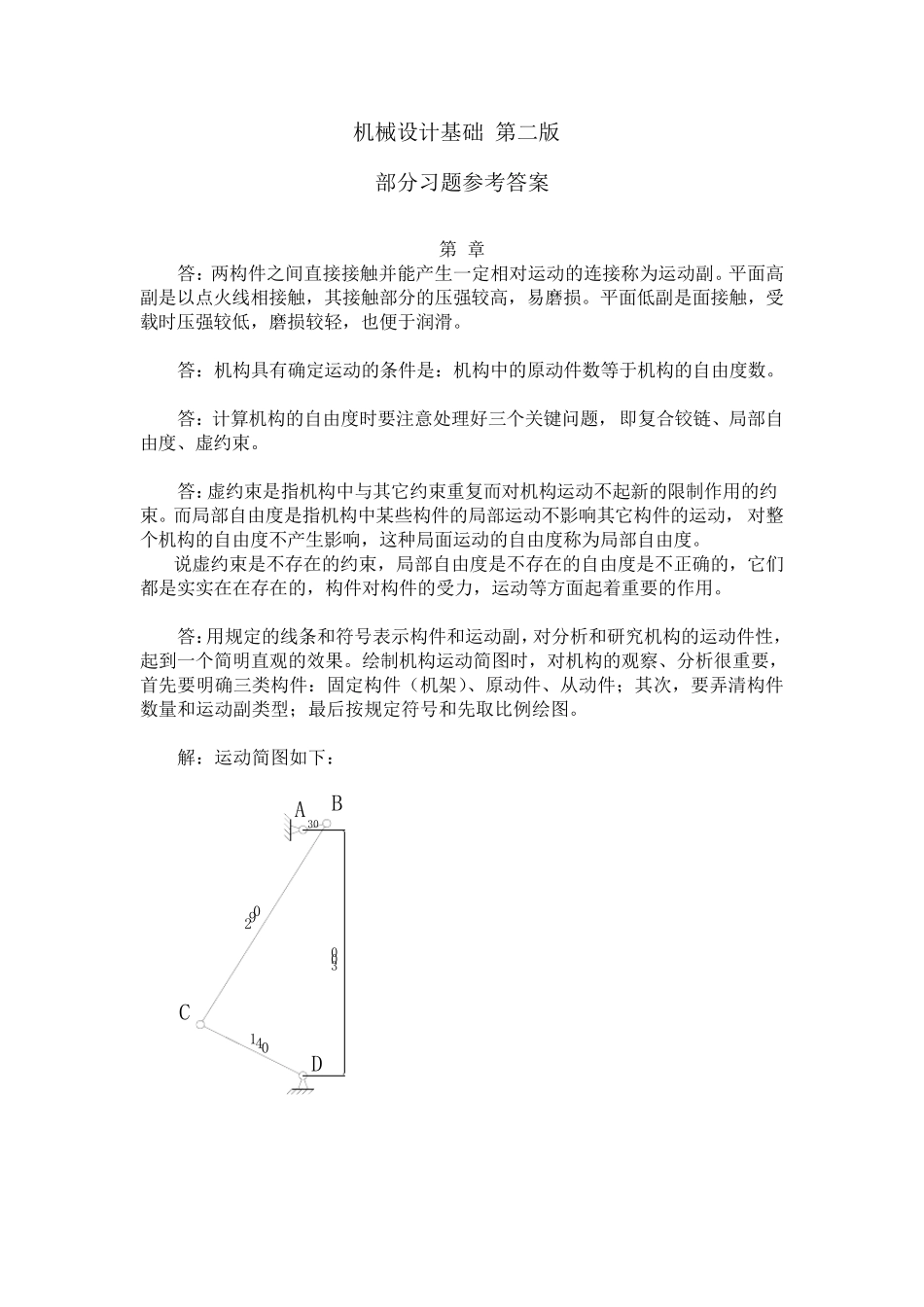
2-6 解:运动简图如下: ABCD302901403002-7 答: F=3n-2PL-PH` =3×3-2×4-0 =1 该机构的自由度数为 1
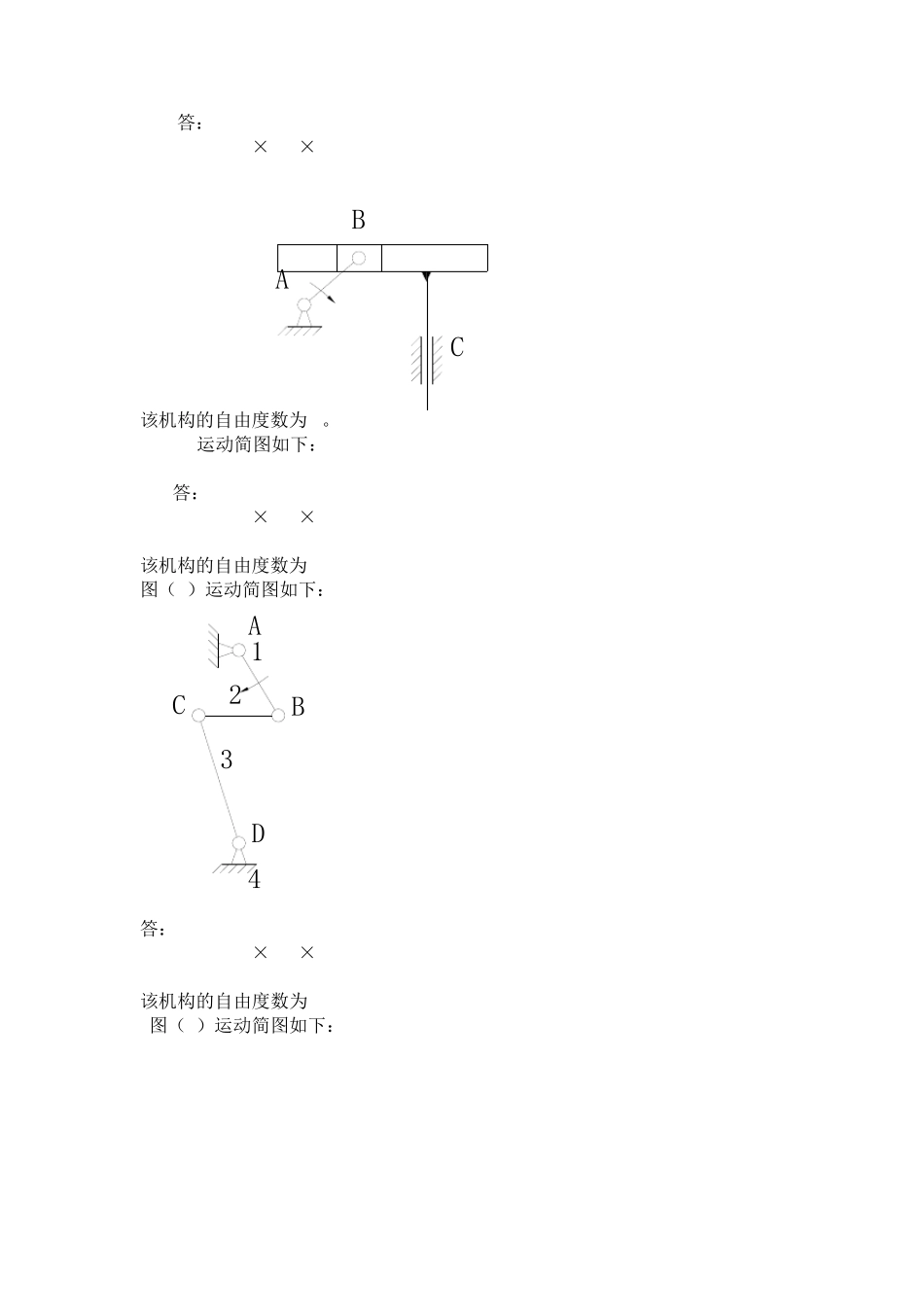
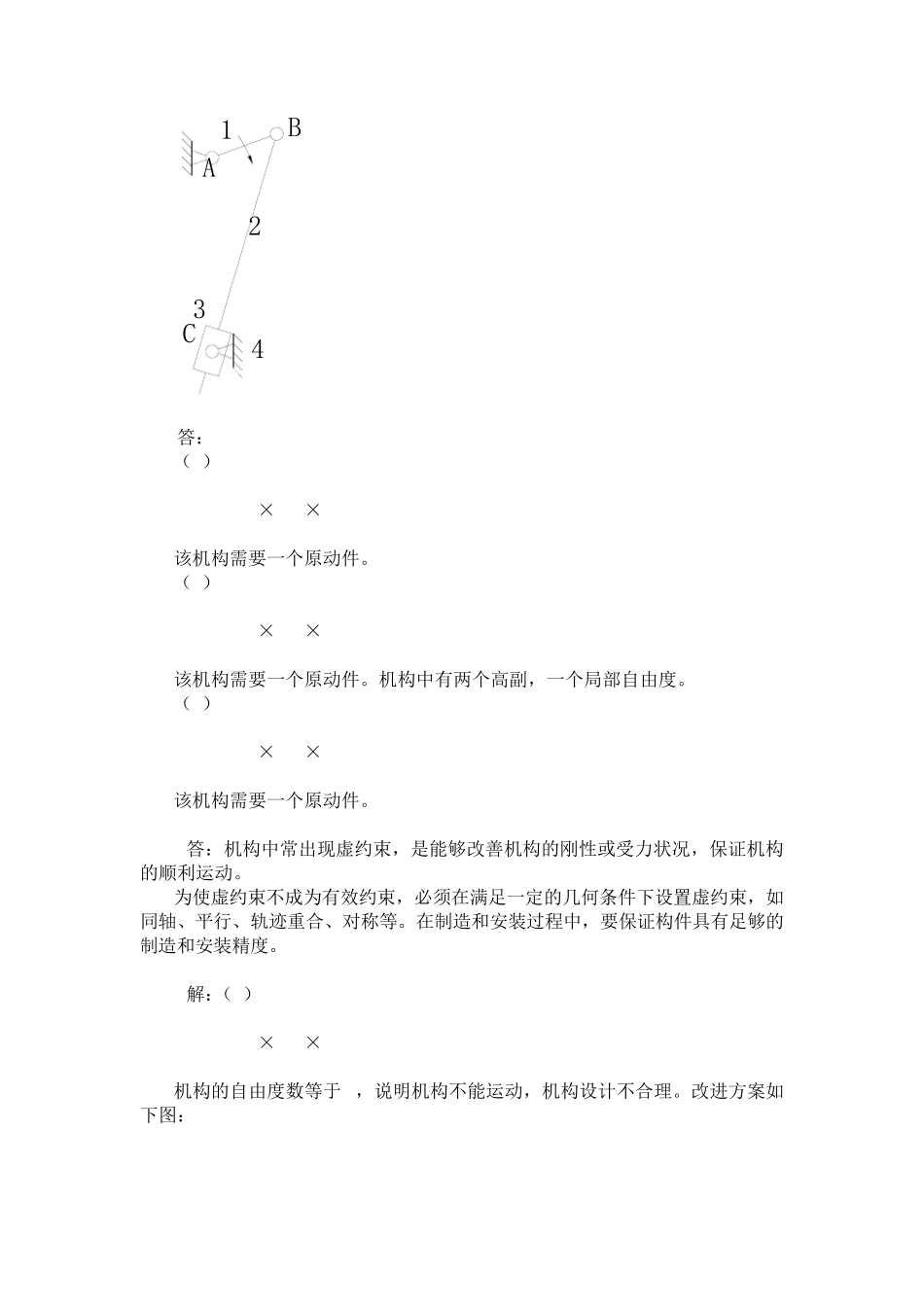
运动简图如下: 2-8答:F=3n-2PL-PH` =3×3-2×4-0 =1 该机构的自由度数为 1 图(a)运动简图如下: ABCD1234 答: F= F=3n-2PL-PH` =3×3-2×4-0 =1 该机构的自由度数为 1 图(b)运动简图如下: ABCABC1234 2-9 答: (a)n=9 PL=13 PH=0 F=3n-2PL-PH` =3×9-2×13-0 =1 该机构需要一个原动件
(b)n=3 PL=3 PH=2