下载后可任意编辑 中国工程大学信息工程院 电力拖动自动控制系统结课论文 题 目: 基于 MATLAB / SIMULINK 沟通变频调速系 统的仿真讨论 班 级: 03094003 姓 名: 任天语 学 号: 030940031 时 间: 2024 年 5 月 29 日 下载后可任意编辑 基于 MATLAB/ SIMULINK 沟通调速系统的仿真讨论摘 要:从异步电动机的数学模型着手,介绍一种基于MATLAB/ SIMUL IN K的异步电动机仿真模型,使用时只需要输入不同的电动机参数即可
在此基础上设计一个典型的矢量控制系统,然后利用MATLAB/ SIMUL IN K仿真软件对该控制系统进行仿真讨论
关键词:MATLAB/ SIMUL IN K;异步电动机;矢量控制;仿真0 引 言随着电力电子变流技术和沟通电机控制理论的进展,出现了许多新型变流装置和沟通电机的调速控制方法
众所周知,异步电动机是一个高阶、非线性、强耦合的多变量系统,再加上在变流装置的非正弦供电条件下运行,使经典的沟通电机理论和传统的控制系统分析方法不能完全适用于现代沟通调速系统
采纳计算机仿真的方法来分析讨论沟通电机及其调速是解决这类工程问题的一种有效工具
利用目前国际上最流行的仿真软件之一MATLAB/ SIMUL IN K,建立一个通用的仿真模型
然后用到直接矢量控制系统中去,对该系统进行仿真讨论
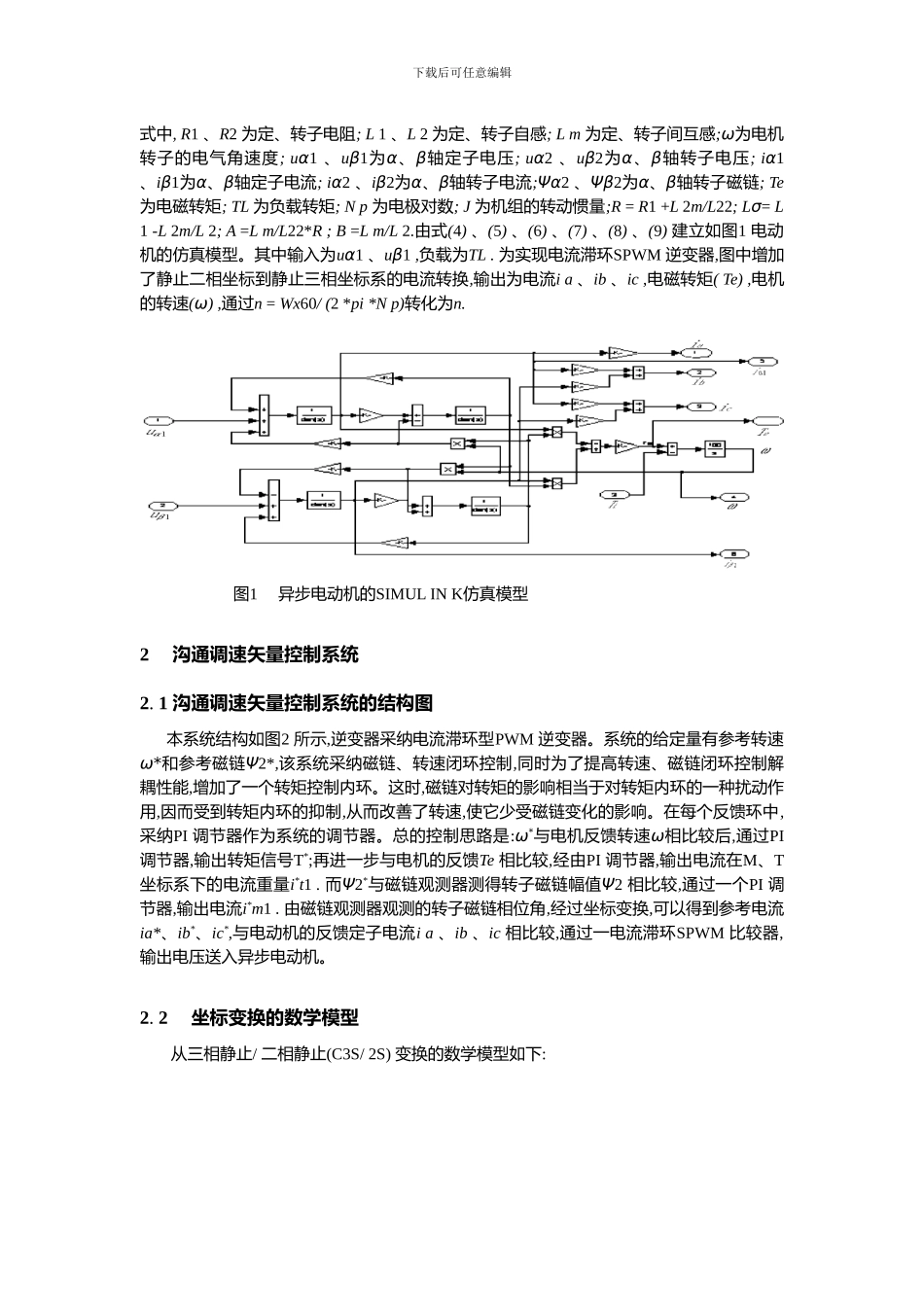
1 异步电动机的仿真模型为了使仿真模型结果尽可能接近异步电动机的实际运行情况,仿真模型应尽可能接近物理对象
由于异步电动机的具有非线性、多变量、强耦合的性质,其模型的建立是否接近实际的物理对象,是整个系统仿真结果是否接近实际情况的关键
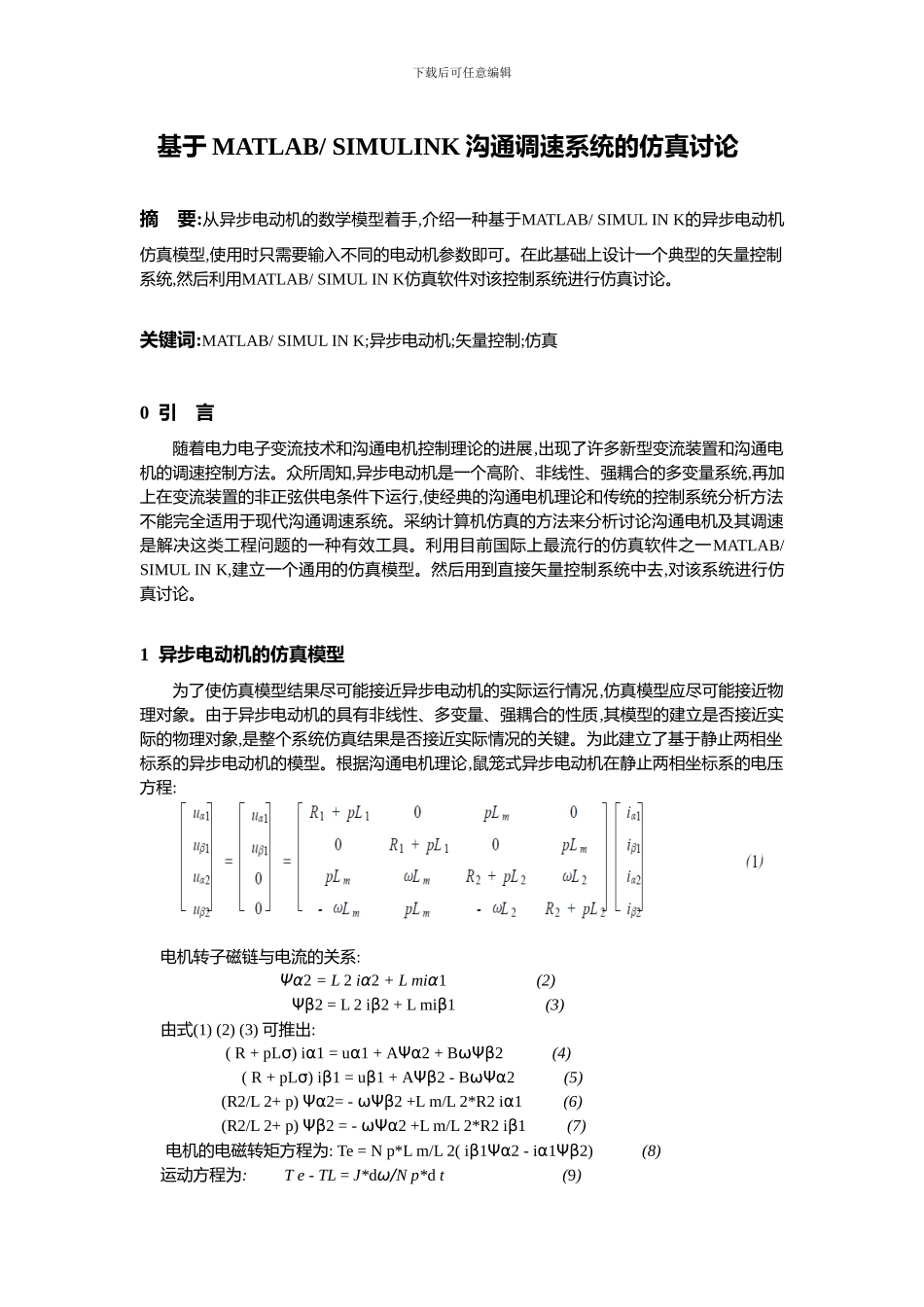
为此建立了基于静止两相坐标系的异步电动机的模型
根据沟通电机理论,鼠笼式异步电动机在静止两相坐标系的电压方程: 电机转子磁链与电流的关系: Ψα2 = L 2 iα2 +