下载后可任意编辑 摘要 本实验完成采纳红外反射式传感器的自寻迹小车的设计与实现
采纳与白色地面色差很大的黑色路线引导小车根据既定路线前进,在意外偏离引导线的情况下自动回位,并能显示小车停止的时间
本设计采纳单片机 STC89C51 作为小车检测、控制、时间显示核心,以实验室给定的车架为车体,两直流机为主驱动,附加相应的电源电路下载电路,显示电路构成整体电路
自动寻迹的功能采纳红外对管 LTH1550 实现,信号经三极管 9012 放大,经 LM339 电压比较器比较之后将信号送给单片机,由单片机通过控制驱动芯片 L298N 驱动电动小车的电机,实现小车的动作
同时还可以将小车的停留时间通过四位数码管显示
关键词:STC89C51 单片机;红外对管 LTH1550;红外传感器;寻迹下载后可任意编辑 一、系统设计任务与要求小车从上坡处开始行驶,到达坡顶停留 5 秒,由数码管显示停留时间,然后继续行驶,到达坡底开始沿黑线行驶,直到终点宽黑线停止
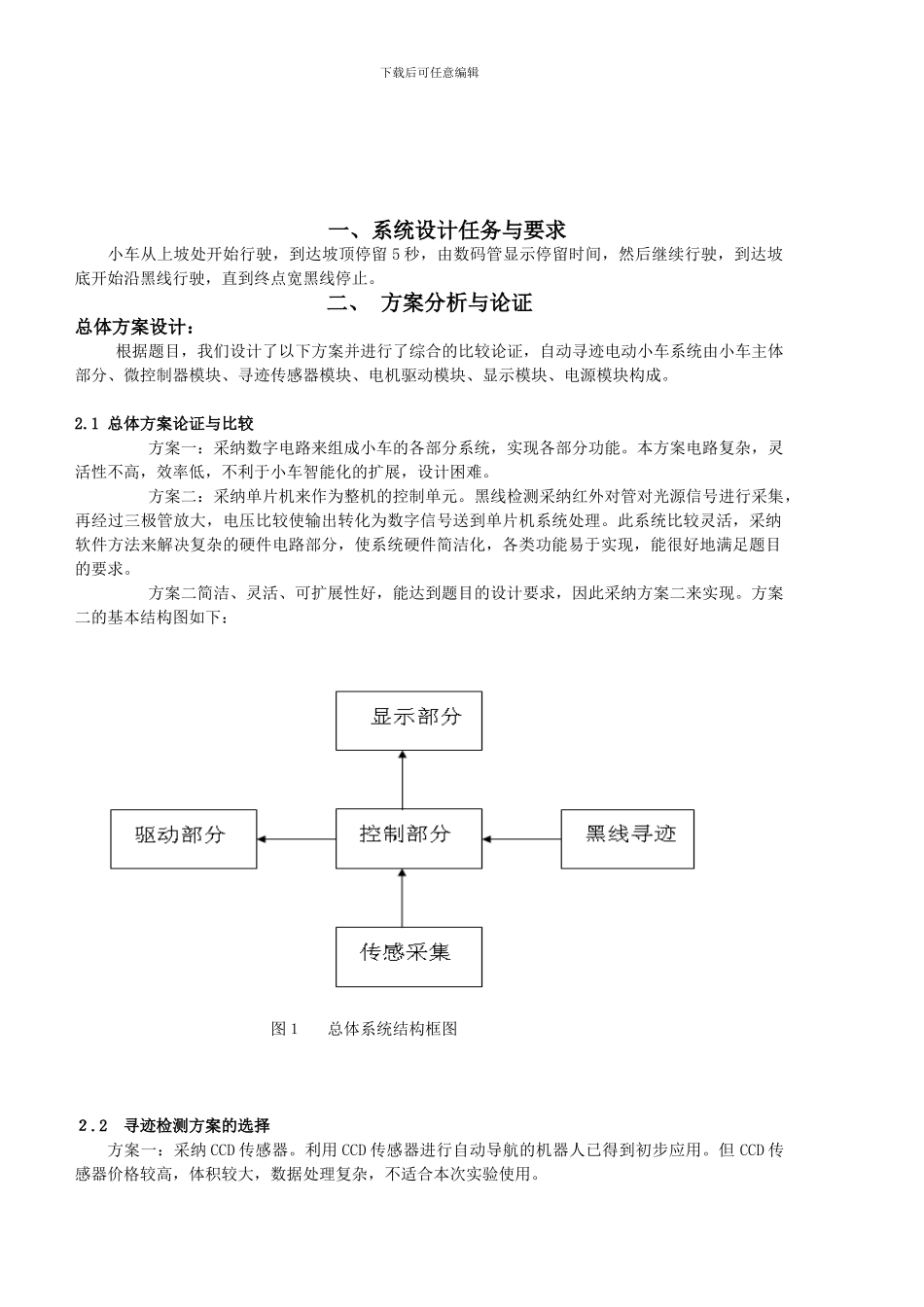
二、 方案分析与论证总体方案设计: 根据题目,我们设计了以下方案并进行了综合的比较论证,自动寻迹电动小车系统由小车主体部分、微控制器模块、寻迹传感器模块、电机驱动模块、显示模块、电源模块构成
1 总体方案论证与比较 方案一:采纳数字电路来组成小车的各部分系统,实现各部分功能
本方案电路复杂,灵活性不高,效率低,不利于小车智能化的扩展,设计困难
方案二:采纳单片机来作为整机的控制单元
黑线检测采纳红外对管对光源信号进行采集,再经过三极管放大,电压比较使输出转化为数字信号送到单片机系统处理
此系统比较灵活,采纳软件方法来解决复杂的硬件电路部分,使系统硬件简洁化,各类功能易于实现,能很好地满足题目的要求
方案二简洁、灵活、可扩展性好,能达到题目的设计要求,因此采纳方案二来实现
方案二的基本结构图如下: 图1 总体系统结构框图 2