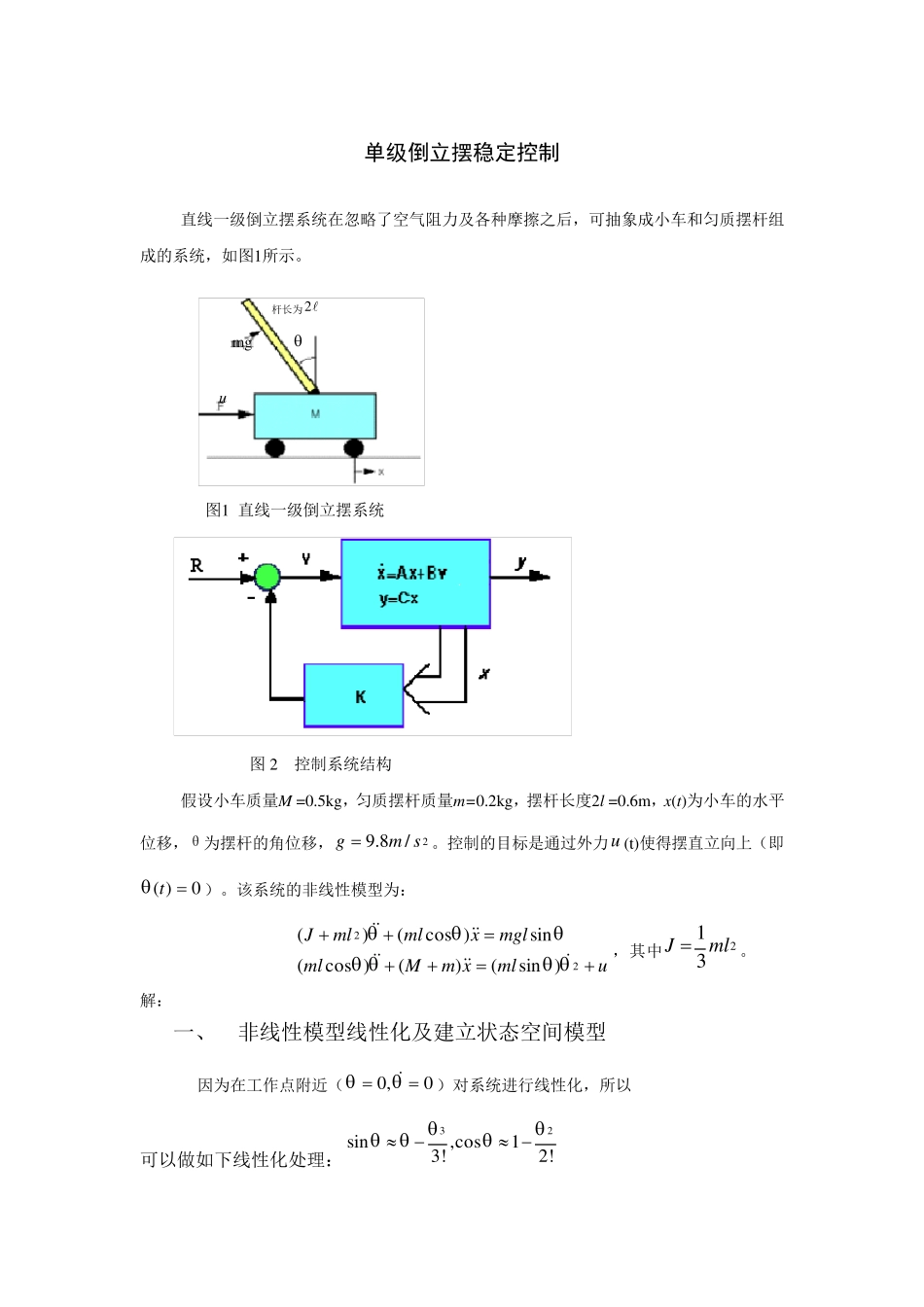
单级倒立摆稳定控制 直线一级倒立摆系统在忽略了空气阻力及各种摩擦之后,可抽象成小车和匀质摆杆组成的系统,如图1所示
mg杆长为2u 图1 直线一级倒立摆系统 图2 控制系统结构 假设小车质量M =0
5kg,匀质摆杆质量m=0
2kg,摆杆长度2l =0
6m,x(t)为小车的水平位移,θ为摆杆的角位移,2/8
9smg
控制的目标是通过外力u (t)使得摆直立向上(即0)(t)
该系统的非线性模型为: umlxmMmlmglxmlmlJ22)sin()()cos(sin)cos()(,其中231mlJ
解: 一、 非线性模型线性化及建立状态空间模型 因为在工作点附近(0,0)对系统进行线性化,所以 可以做如下线性化处理:32sin,cos13
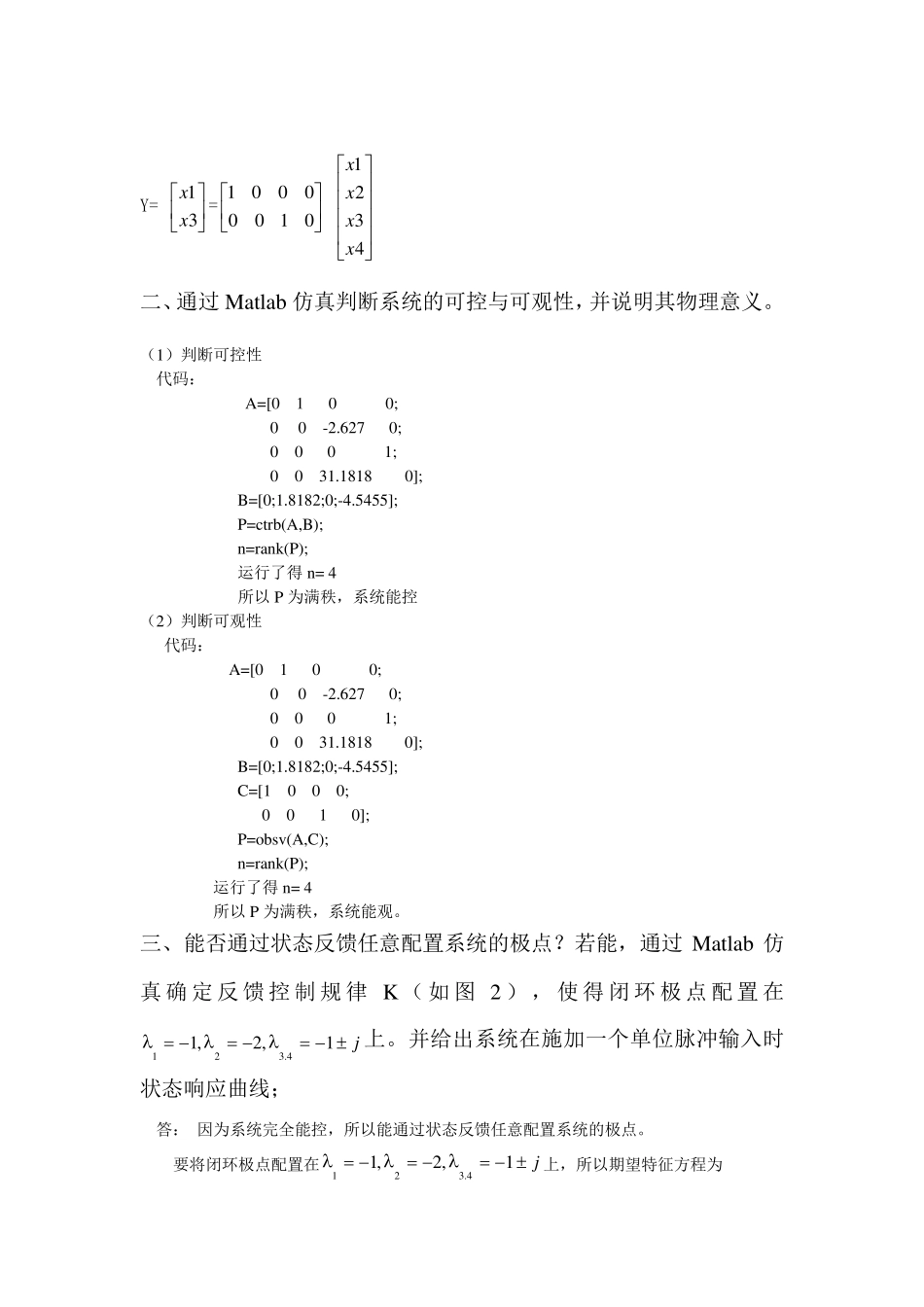
当θ 很小时,由cosθ、sinθ 的幂级数展开式可知,忽略高次项后, 可得 cosθ≈1,sinθ≈θ,θ’^2≈0; 因此模型线性化后如下: (J+ml^2)θ’’+mlx’’=mglθ (a) mlθ’’+(M+m) x’’=u (b) 其中231mlJ 取系统的状态变量为,,,,4321xxxxxx输出Txy][包括小车位移和摆杆的角位移
即 X=4321xxxx=''xx Y=x =31xx 由线性化后运动方程组得 X1’=x’=x2 x2’=x’’=mmMmg3)(43x3+mmM3)(44u X3’ =θ’=x4 x4’=θ’’=mllmMgmM3)(4)(3x3+mllmM3)(43u 故空间状态方程如下: X’='4'3