1 三菱运动控制器SFC 程序的开发 1
三菱SFC 编程方法 使用运动控制器的机床的基本工作模式可以分为以下类型: ①JOG 模式 ②回原点模式 ③手轮模式 ④自动模式 2
SFC 图的构建基本思路 ① 4 种工作模式是必不可少的
②将每个基本工作模式,最基本的工作流程编成一个”子程序”,然后一级一级的调用”子程序”
编程方法是先构建”主程序”和”模式选择程序”,然后一级一级填空
1 主程序SFC 图(图 1) 主程序只是一个对”工作模式选择”子程序的调用程序
通过”急停信号”的ON/OFF 来实现”调用或退出”子程序
主程序SFC 流程 编制主程序的目的之一,就是只用一个急停信号就可以停止整个程序的运行
通过参数设定主程序上电后就运行,不受任何条件限制
主程序处于不断的”跳跃循环”
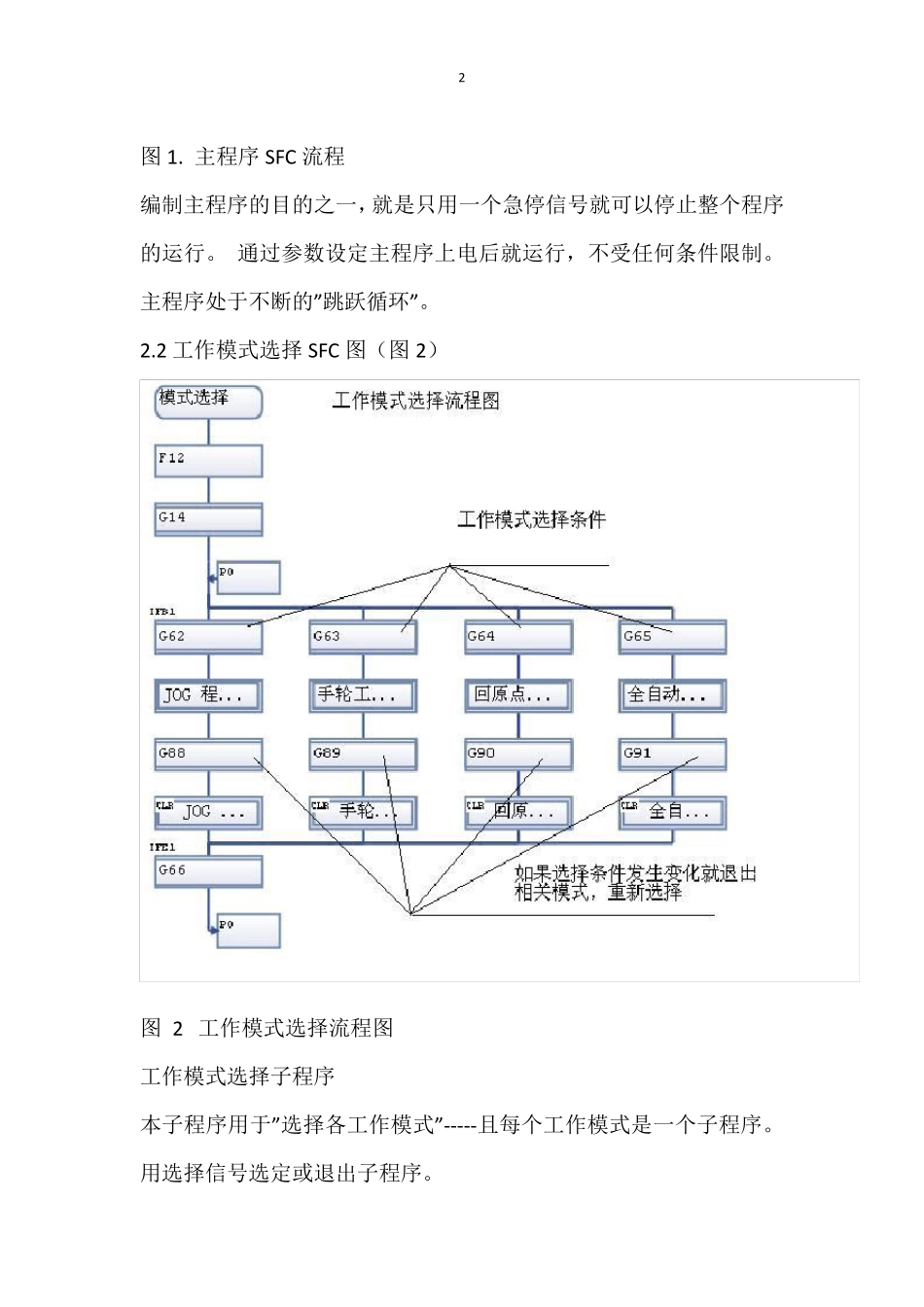
2 工作模式选择 SFC 图(图2) 图 2 工作模式选择流程图 工作模式选择子程序 本子程序用于”选择各工作模式”-----且每个工作模式是一个子程序
用选择信号选定或退出子程序
3 “退出子程序”是MOTION 特有的指令
图 2 中, G62-G65 是模式选择判断条件,如果某一条件满足就选择对应的”工作模式”
G88-G91 是退出某工作模式的判断条件,如果某一条件满足就立即退出对应的”工作模式”,转入重新选择判断
这些条件判断程序可以在”顺控程序”中编制
(由信息程序和参数刷新)
当然也可以在本身的G 步中做运算
构建模式选择程序的好处是:可以在一个模式内设置运行条件和检查问题,而与其他模式不相干
模式选择程序是第 2 级子程序
3 JOG 模式的 SFC 图 图 3 JOG 模式的 SFC 图 注意在 JOG 模式中,没有K 步,只有”计算”步, 因为 JOG 的速度设4 置和正反转启动只需要启动停止某个M 信号