两轮自平衡机器人设计详述 近年来,随着移动机器人研究不断深入、其应用领域更加广泛,面临的环境和任务也越来越复杂
有时机器人会遇到比较狭窄,而且有许多大转角的工作场合,如何在这样的环境里灵活快捷的执行任务,成为人们颇为关心的一个问题
两轮自平衡机器人概念就是在这样的背景下提出来的,这种机器人两轮共轴、独立驱动,车身重心倒置于车轮轴上方,通过运动保持平衡,可直立行走
由于特殊的结构,其适应地形变化能力强,运动灵活,可以胜任一些复杂环境里的工作
以前对于两轮自平衡机器人的运动控制的研究,理论上取得了许多开创性的进展,但这样的算法依赖于精确的模型和完整的信息,大多停留在理论研究和仿真的阶段实际,应用中并不多见
大部分实际应用的移动机器人左右轮的运动控制都是基于双闭环的电机控制,直接将电压作为控制量,利用模拟电子电路进行控制[1]
这样控制策略存在着精度低、可靠度差、效率低等缺点
本文针对两轮自平衡机器人在实际应用中存在的问题,应用最优控制及两轮差动等控制方法设计了控制器,提出了针对两轮自平衡机器人平衡和行进的新策略
为了提高两轮自平衡机器人的控制效果,利用基于 DSP 数字电路的全数字智能伺服驱动单元 IPM100 分别精确控制左右轮电机,并利用上位机实时控制机器人的运动状态,提高了控制精度、可靠度以及集成度,最终得到了很好的控制效果
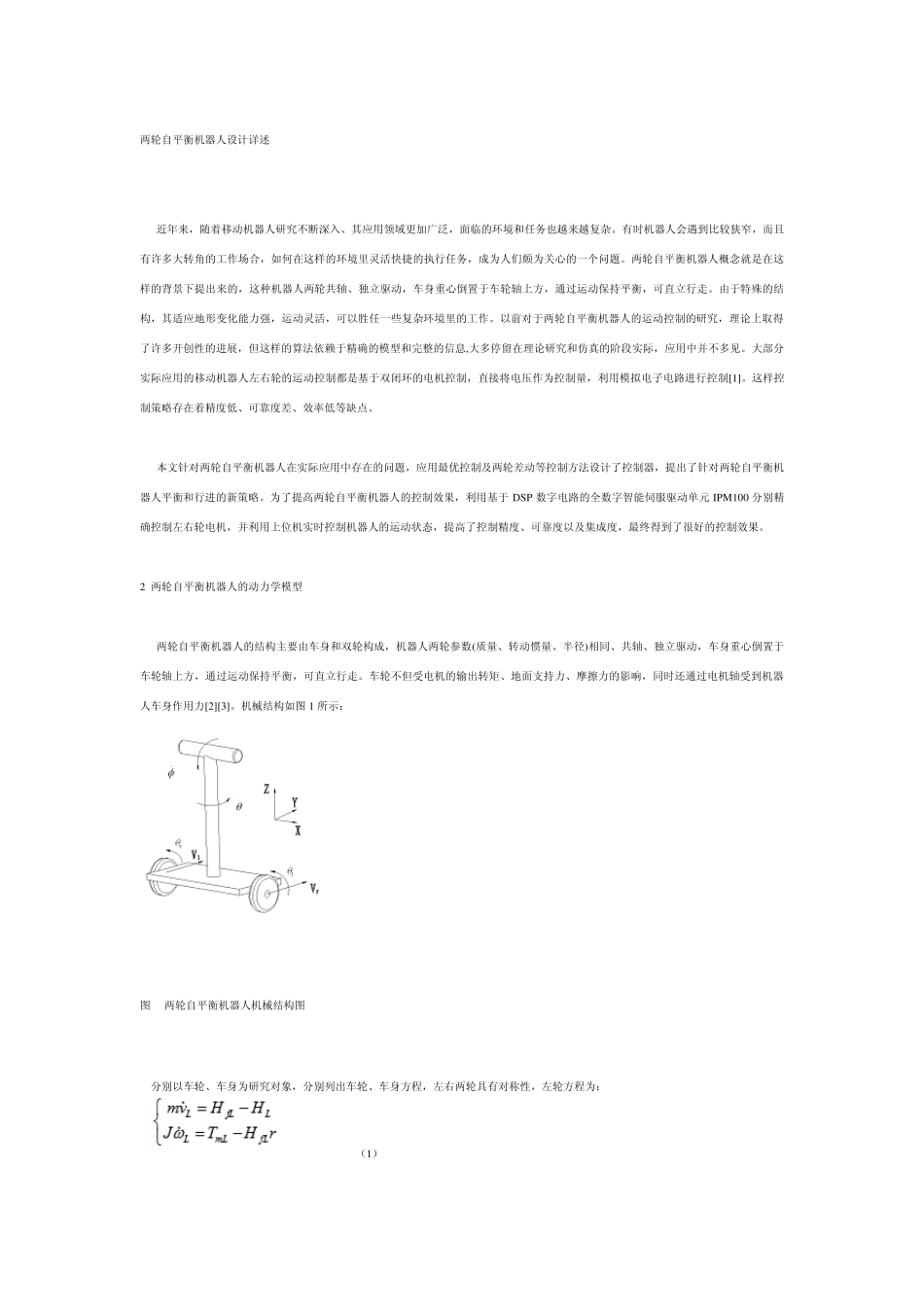
2 两轮自平衡机器人的动力学模型 两轮自平衡机器人的结构主要由车身和双轮构成,机器人两轮参数(质量、转动惯量、半径)相同、共轴、独立驱动,车身重心倒置于车轮轴上方,通过运动保持平衡,可直立行走
车轮不但受电机的输出转矩、地面支持力、摩擦力的影响,同时还通过电机轴受到机器人车身作用力[2][3]
机械结构如图 1 所示: 图 1两轮自平衡机器人机械结构图 分别以车轮、车身为研究对象,分别列出车轮、车身方程,左右两轮具有对称性,左轮方程为: (1)