- 1 - 实验报告 实验项目名称 Simu link 熟悉及其应用 所属课程名称 系统仿真与 matlab 实 验 日 期 班 级 自动化 1203 学 号 U201214514 姓 名 董鸣远 成 绩 - 2 - 实验概述: 【实验目的及要求】 本部分的目的在于学习matlab中有关simulink的正确使用及其应用,包括:simulink的基本使用、模型的建立、模型的复制剪切粘贴、命名等、线的基本使用、子系统的建立、属性的设置、参数的设置与应用、simulink仿真运行参数的设置等
通过该实验,要求能够做到不查参考书,能熟练编写基本的simulink应用
【实验环境】(使用的软件) 微机 Windows XP Matlab 7
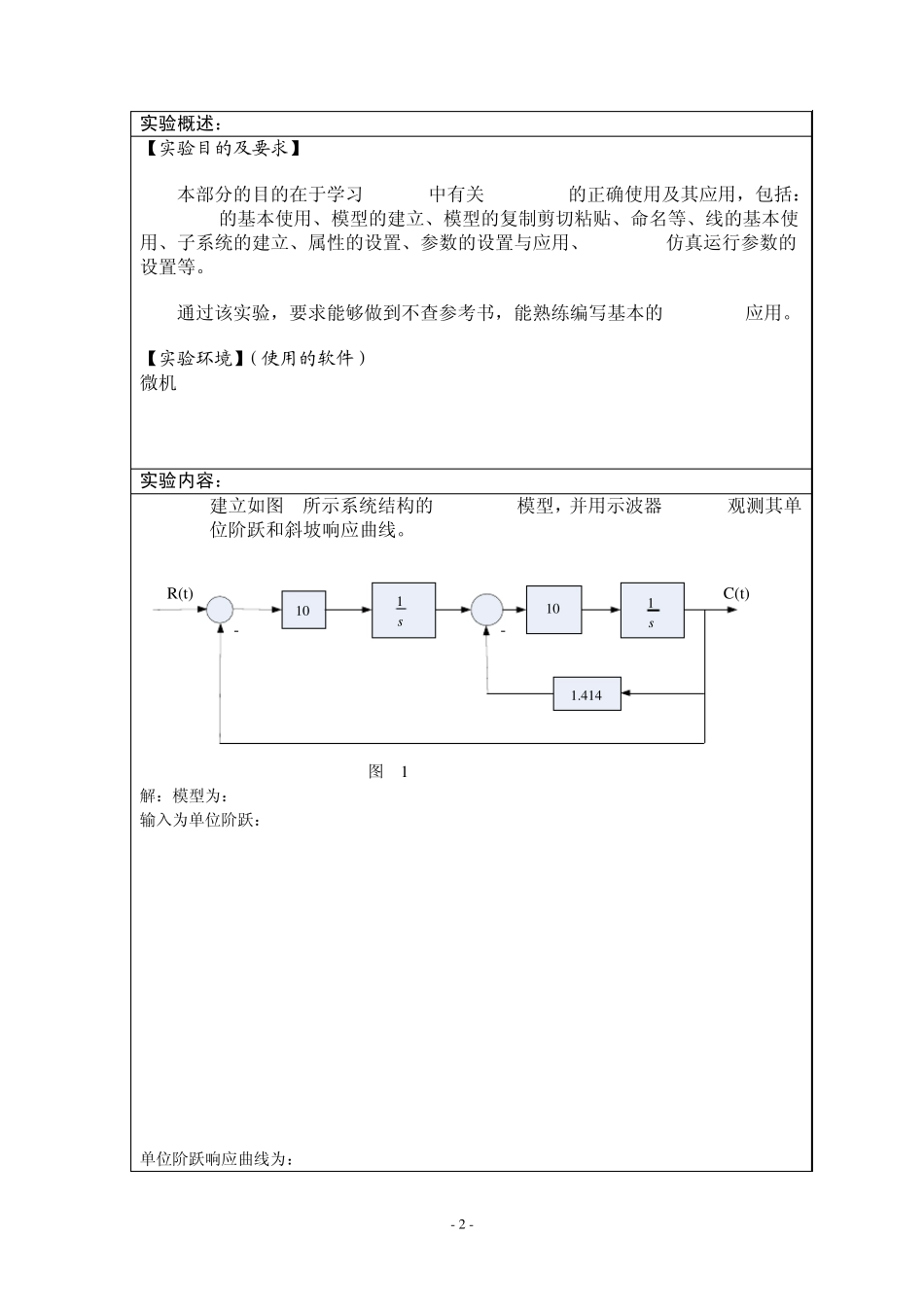
0 实验内容: [1] 建立如图 1所示系统结构的Simulink模型,并用示波器(Scope)观测其单位阶跃和斜坡响应曲线
101s101s1
414R(t)C(t)-- 图 1 解:模型为: 输入为单位阶跃: 单位阶跃响应曲线为: - 3 - 输入为斜坡模型: 斜坡响应曲线: - 4 - [2] 建立如图2所示PID控制系统的Simulink模型,对系统进行单位阶跃响应仿真,用plot函数绘制出响应曲线
其中pk =10,ik =3,dk =2
要求PID部分用subsystem实现,参数pk 、ik 、 dk 通过 subsystem参数输入来实现
pkikdk1s/dudt324327242410355024sssssssR(s)C(s) 图 2 解: Simulink 模型为: - 5 - P ID 控制器子系统内部模型: 参数选择: 响应曲线: - 6 - Fix ed Step=0
01 Solv er: ode5 使用plot 函数绘制单位阶跃响应曲线: [3] 建立如图3所示控制系统的Simulink模型