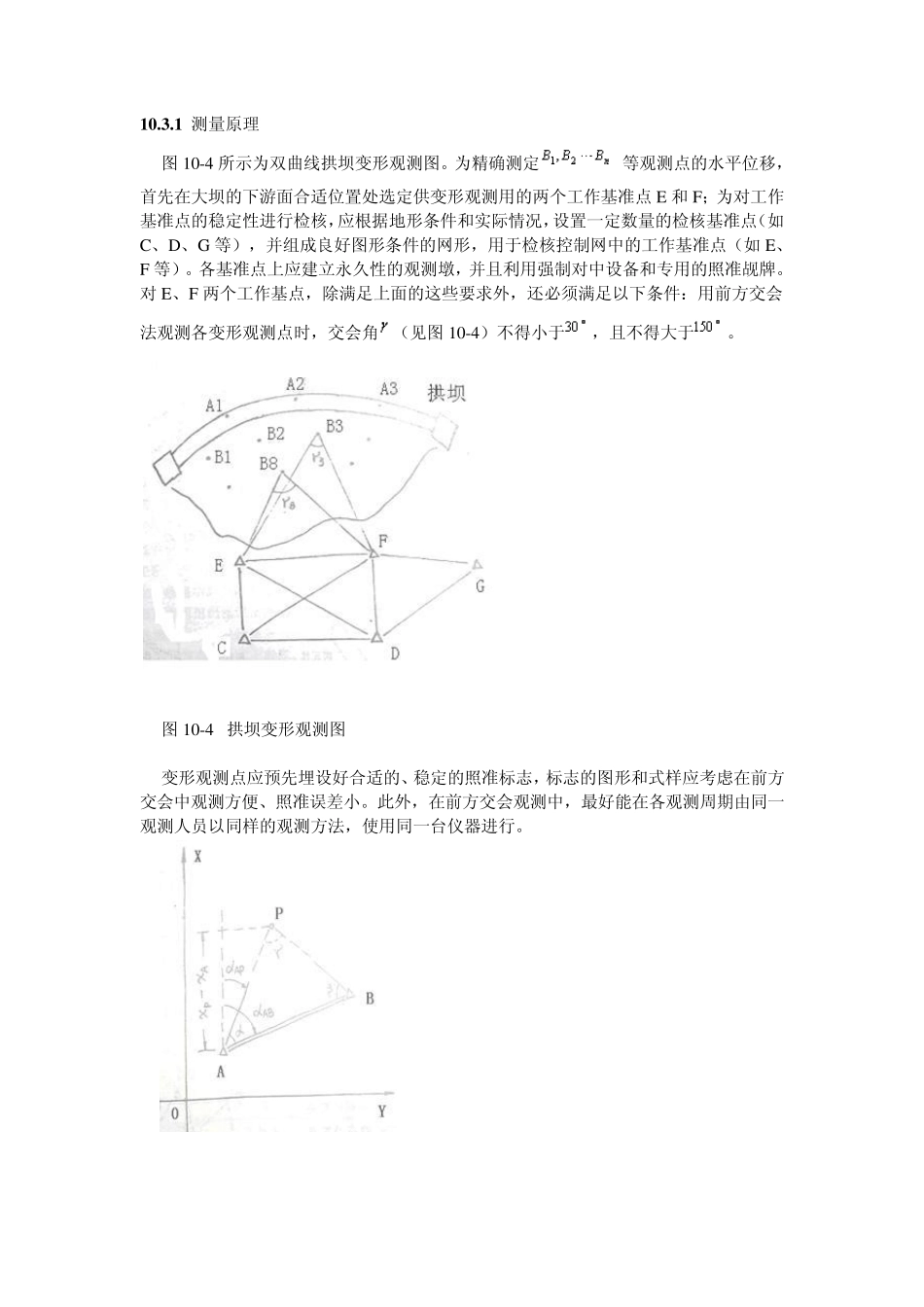
1 测量原理 图10-4 所示为双曲线拱坝变形观测图
为精确测定等观测点的水平位移,首先在大坝的下游面合适位置处选定供变形观测用的两个工作基准点E 和F;为对工作基准点的稳定性进行检核,应根据地形条件和实际情况,设置一定数量的检核基准点(如C、D、G 等),并组成良好图形条件的网形,用于检核控制网中的工作基准点(如E、F 等)
各基准点上应建立永久性的观测墩,并且利用强制对中设备和专用的照准觇牌
对E、F 两个工作基点,除满足上面的这些要求外,还必须满足以下条件:用前方交会法观测各变形观测点时,交会角(见图10-4)不得小于,且不得大于
图10-4 拱坝变形观测图 变形观测点应预先埋设好合适的、稳定的照准标志,标志的图形和式样应考虑在前方交会中观测方便、照准误差小
此外,在前方交会观测中,最好能在各观测周期由同一观测人员以同样的观测方法,使用同一台仪器进行
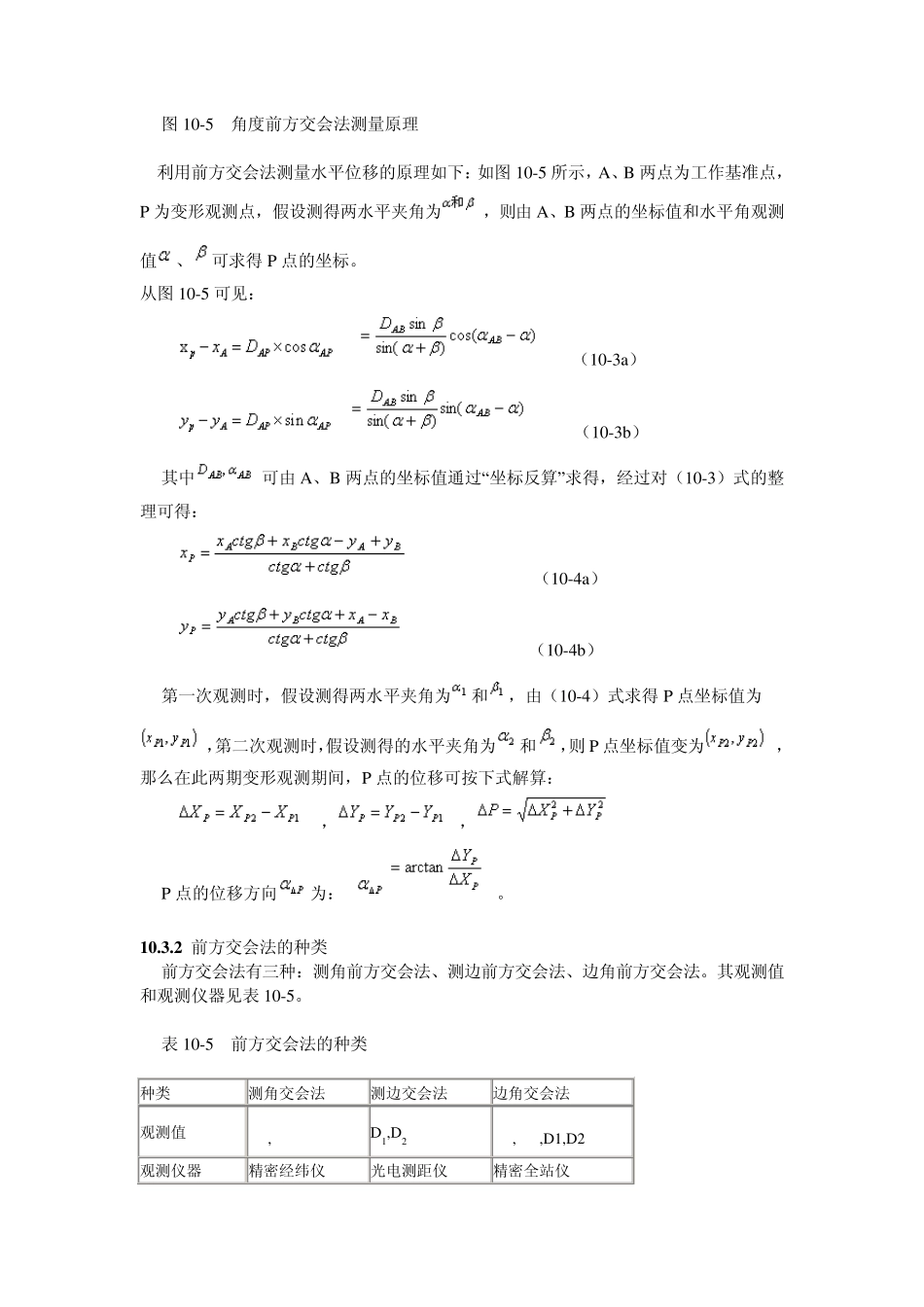
图10-5 角度前方交会法测量原理 利用前方交会法测量水平位移的原理如下:如图10-5 所示,A、B 两点为工作基准点,P 为变形观测点,假设测得两水平夹角为,则由 A、B 两点的坐标值和水平角观测值、可求得 P 点的坐标
从图10-5 可见: (10-3a) (10-3b) 其中可由 A、B 两点的坐标值通过“坐标反算”求得,经过对(10-3)式的整理可得: (10-4a) (10-4b) 第一次观测时,假设测得两水平夹角为和,由(10-4)式求得 P 点坐标值为,第二次观测时,假设测得的水平夹角为和,则 P 点坐标值变为,那么在此两期变形观测期间,P 点的位移可按下式解算: ,, P 点的位移方向为:
2 前方交会法的种类 前方交会法有三种:测角前方交会法、测边前方交会法、边角前方交会法
其观测值和观测仪器见表 10-5
表 10-5 前方交会法的种类 种类 测角交会法 测