精品文档---下载后可任意编辑瓦力智能科技SCARA 机器人视觉系统操作手册☉请确保使用操作手册到达产品的最终使用者手中瓦 力 智 能 科 技V a l iI n t e l li g e n t T e c h n o l o g yC o r p o r a t i o n操作前,请注意安全
确认人员与周边设备都在工作范围外
内容若有错误,请以原厂操作说明书为准
步骤:1.设定视觉坐标及世界坐标的点位,要求点位十分精确,否则影响机器人运行的结果2.设定要抓取物件的模板3.视觉精度测试与校正4.编写程序5.运行程序步骤详细操作说明:1
设定视觉坐标及世界坐标的点位第一步:设定测试模板
开启本软件,打开‘参数’->‘视觉’->‘模板设定’界面
单击‘开始采集’,选择‘制作模板’中的‘定位模式’为圆形(以抓取目标为准)
框选测试目标,然后单击鼠标右键
单击‘设定模板’,稍等一段时间后,再选择‘模板形状’为矩形
框选整个视频屏幕,单击鼠标右键
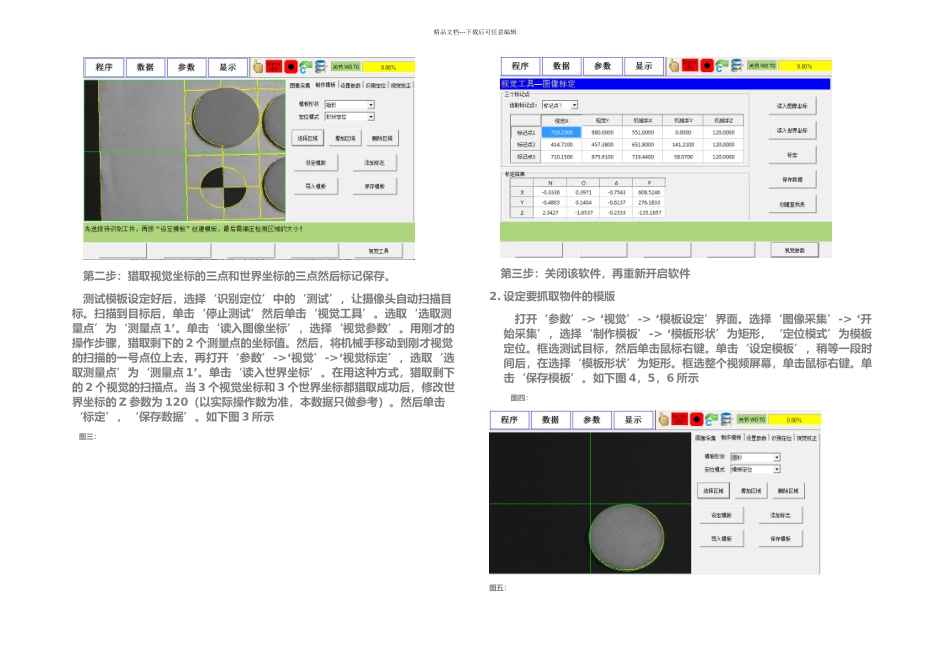
如下图 1,2 所示图一:图二:精品文档---下载后可任意编辑第二步:猎取视觉坐标的三点和世界坐标的三点然后标记保存
测试模板设定好后,选择‘识别定位’中的‘测试’,让摄像头自动扫描目标
扫描到目标后,单击‘停止测试’然后单击‘视觉工具’
选取‘选取测量点’为‘测量点 1’
单击‘读入图像坐标’,选择‘视觉参数’
用刚才的操作步骤,猎取剩下的 2 个测量点的坐标值
然后,将机械手移动到刚才视觉的扫描的一号点位上去,再打开‘参数’->‘视觉’->‘视觉标定’,选取‘选取测量点’为‘测量点 1’
单击‘读入世界坐标’
在用这种方式,猎取剩下的 2 个视觉的扫描点
当 3 个视觉坐标和 3 个世界坐标都猎取成功后,修改世界坐标的 Z 参数为 120(以实际操作数为准,本数据只做参考)
然后单击‘标定’,‘保存数据’
如下图 3 所示图三:第三