精品文档---下载后可任意编辑第2章平面机构的结构分析和;构件是机构中的单元体
、、等三个特征的构件组合体称为机器
从机构结构观点来看,任何机构是由三部分组成
; 机构的自由度是指
两构件之间以线接触所组成的平面运动副,称为副,它产生个约束,而保留个自由度
机构的自由度
在平面机构中若引入一个高副将引入______个约束,而引入一个低副将引入_____个约束,构件数、约束数与机构自由度的关系是
,最小约束数为
当两构件构成运动副后,仍需保证能产生一定的相对运动,故在平面机构中,每个运动副引入的约束至多为,至少为
______
在平面机构中,具有两个约束的运动副是副,具有一个约束的运动副是副
F=,应用此公式时应注意推断:(A)铰链,(B)自由度,(C)约束
;局部自由度是指;虚约束是指
的杆组级别考虑,机构的级别按杆组中的级别确定
图示为一机构的初拟设计方案
试:(1〕计算其自由度,分析其设计是否合理
如有复合铰链,局部自由度和虚约束需说明
(2)如此初拟方案不合理,请修改并用简图表示
题 16 图 题 17 图17
在图示机构中,若以构件 1 为主动件,试:(1)计算自由度,说明是否有确定运动
(2)如要使构件 6 有确定运动,并作连续转动,则可如何修改
说明修改的要点,并用简图表示
计算图示机构的自由度,将高副用低副代替,并选择原动件
试画出图示机构的运动简图,并计算其自由度
对图示机构作出仅含低副的替代机构,进行结构分析并确定机构的级别
题 19 图 题 20 图20
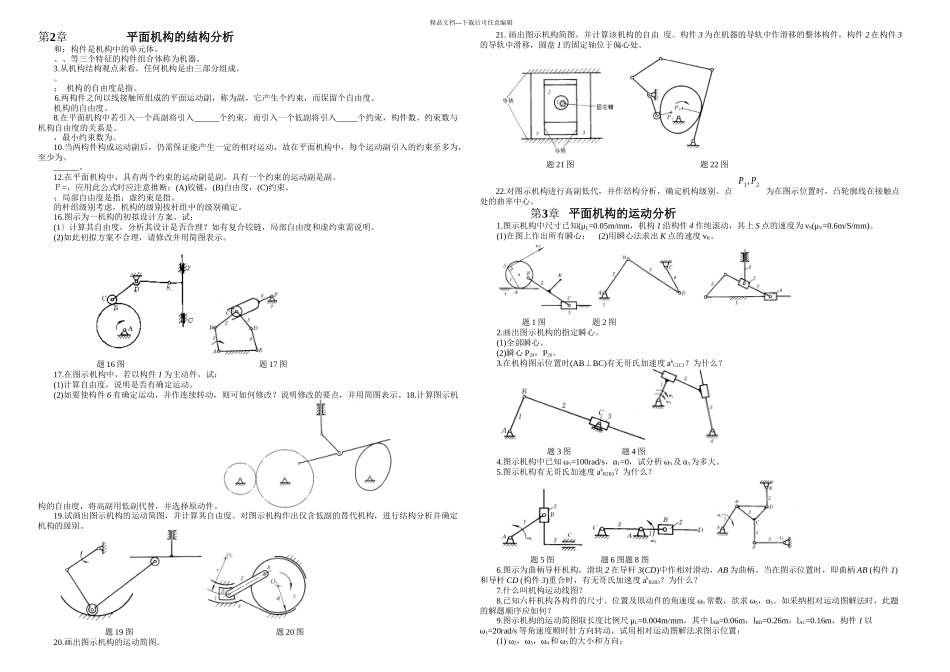
画出图示机构的运动简图
画出图示机构简图,并计算该机构的自由 度
构件 3 为在机器的导轨中作滑移的整体构件,构件 2 在构件 3的导轨中滑移,圆盘 1 的固定轴位于偏心处
题 21 图 题 22 图22
对图示机构进行高副低代,并作结构分析,确定机构