正 文 开 始 : 这 篇 文 章 分 为 三 个 部 分 : • PID 原 理 普 及 • 常 用 四 轴 的 两 种 PID 算 法 讲 解 (单 环 PID、串级 PID) • 如何做到垂直起飞、四 轴 飞行时为 何会飘、如何做到脱控
PID 原 理 普 及 1、 对自动控制系统的 基本要求: 稳、准、快: 稳 定 性 ( P 和 I 降 低系统稳 定 性 ,D 提高系统稳 定 性 ): 在平衡状态下,系统受到某个 干扰后,经过一段时间其被控量可以达到某一稳定状态; 准确性 ( P 和 I 提高稳 态精度,D 无作用): 系统处于稳态时,其稳态误差; 快速性 ( P 和 D 提高响应速度,I 降 低响应速度): 系统对动态响应的 要求
一般由过渡时间的 长短来衡量
2、 稳定性: 当系统处于平衡状态时,受到某一干扰作用 后,如果系统输出能够恢复到原 来的 稳态值,那么系统就是稳定的 ;否则,系统不稳定
3、 动态特性(暂态特性,由于系统惯性引起): 系统突加给定量(或者负载突然变化)时,其系统输出的 动态响应曲线
延迟时间、上升时间、峰值时间、调节时间、超调量和振荡次数
通常 : 上升时间和峰值时间用 来评价系统的 响应速度; 超调量用 来评价系统的 阻尼程度; 调节时间同时反应响应速度和阻尼程度; 4、 稳 态 特 性 : 在 参 考 信 号 输 出 下 , 经 过 无 穷 时 间 , 其 系 统 输 出 与 参 考 信 号 的误 差
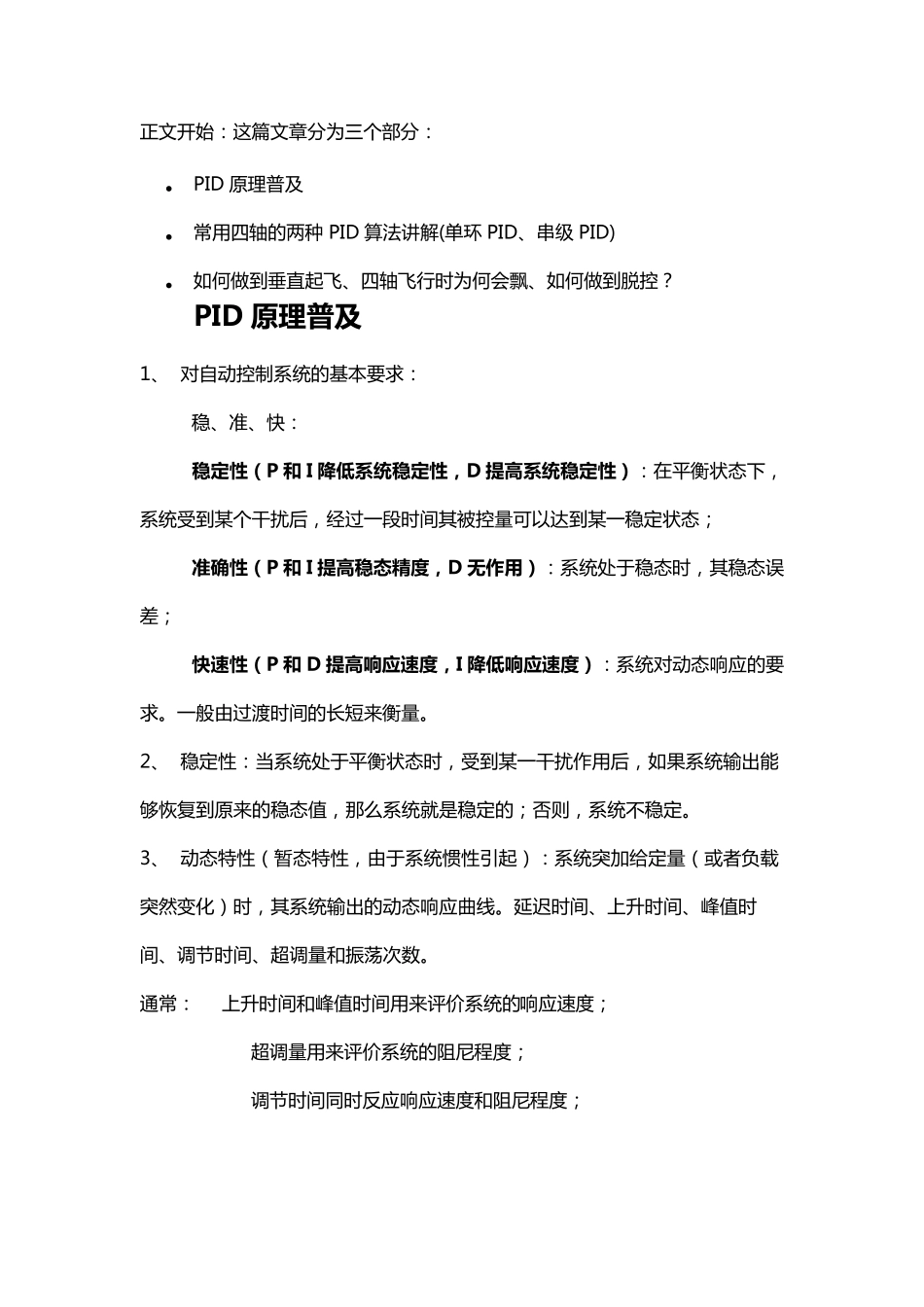
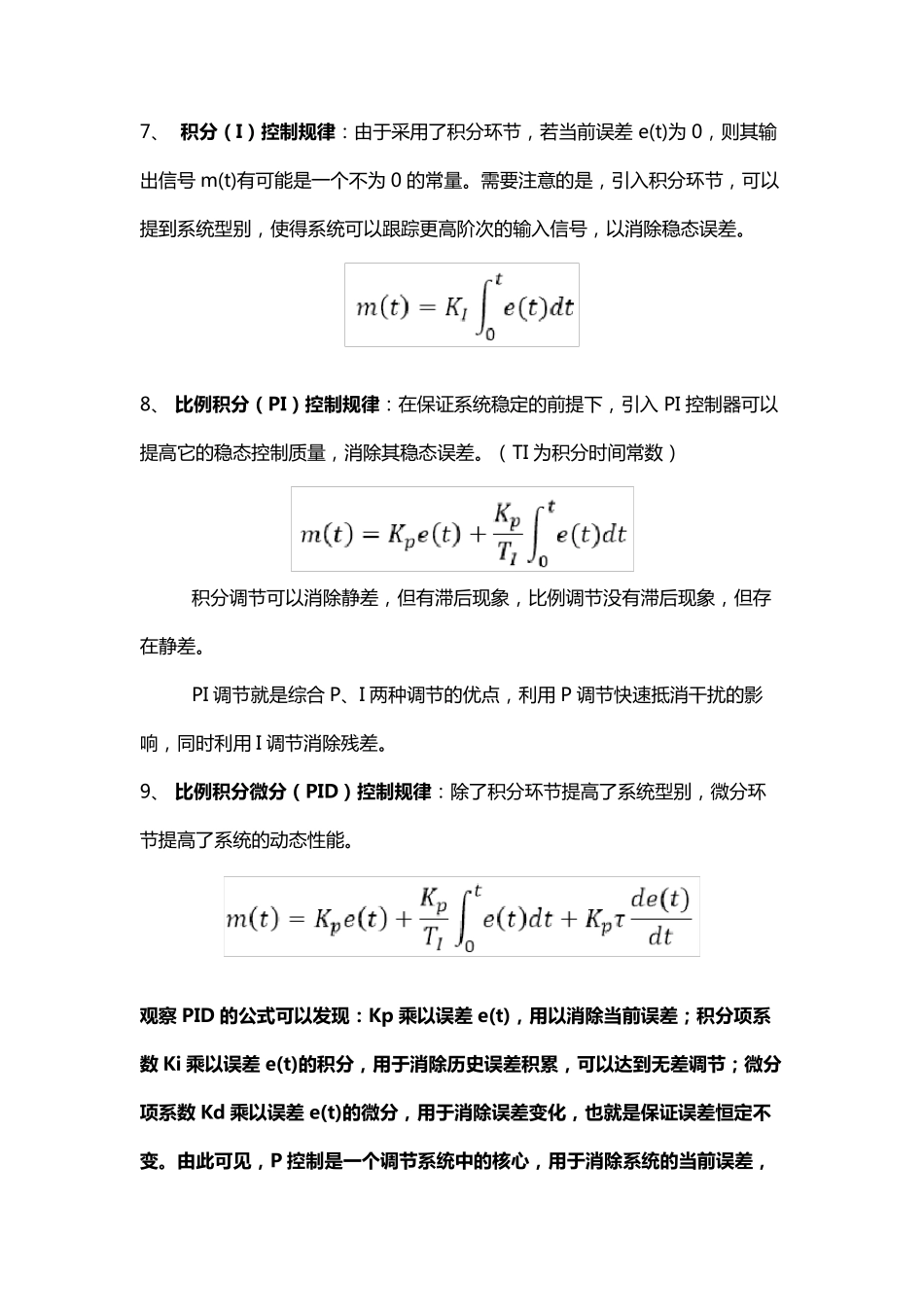
影 响 因 素 : 系 统 结 构 、 参 数 和 输 入 量 的 形 式 等 5、 比 例(P)控制规律: 具 有 P 控 制 的 系 统 , 其 稳 态 误 差 可 通 过 P 控 制 器 的增 益 Kp 来 调 整 : Kp 越 大 , 稳 态 误 差 越 小 ; 反 之 , 稳 态 误 差 越 大