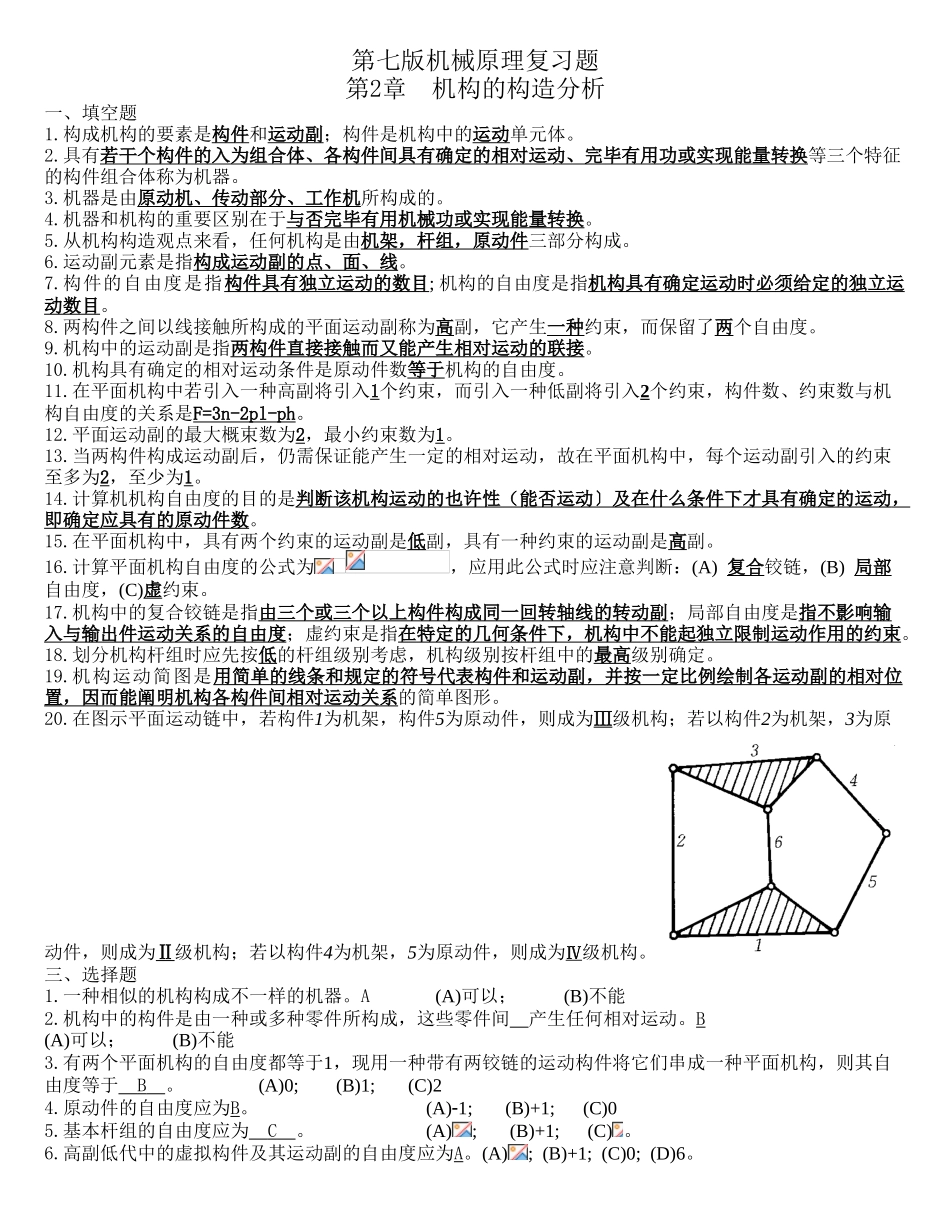
第七版机械原理复习题第2章 机构的构造分析一、填空题1.构成机构的要素是构件和运动副;构件是机构中的运动单元体。2.具有若干个构件的入为组合体、各构件间具有确定的相对运动、完毕有用功或实现能量转换等三个特征的构件组合体称为机器。3.机器是由原动机、传动部分、工作机所构成的。4.机器和机构的重要区别在于与否完毕有用机械功或实现能量转换。5.从机构构造观点来看,任何机构是由机架,杆组,原动件三部分构成。6.运动副元素是指构成运动副的点、面、线。7.构件的自由度是指构件具有独立运动的数目; 机构的自由度是指机构具有确定运动时必须给定的独立运动数目。8.两构件之间以线接触所构成的平面运动副称为高副,它产生一种约束,而保留了两个自由度。9.机构中的运动副是指两构件直接接触而又能产生相对运动的联接。10.机构具有确定的相对运动条件是原动件数等于机构的自由度。11.在平面机构中若引入一种高副将引入1个约束,而引入一种低副将引入2个约束,构件数、约束数与机构自由度的关系是F=3n-2pl-ph。12.平面运动副的最大概束数为2,最小约束数为1。13.当两构件构成运动副后,仍需保证能产生一定的相对运动,故在平面机构中,每个运动副引入的约束至多为2,至少为1。14.计算机机构自由度的目的是判断该机构运动的也许性(能否运动〕及在什么条件下才具有确定的运动 , 即确定应具有的原动件数。15.在平面机构中,具有两个约束的运动副是低副,具有一种约束的运动副是高副。16.计算平面机构自由度的公式为,应用此公式时应注意判断:(A) 复合铰链,(B) 局部自由度,(C)虚约束。17.机构中的复合铰链是指由三个或三个以上构件构成同一回转轴线的转动副;局部自由度是指不影响输入与输出件运动关系的自由度;虚约束是指在特定的几何条件下,机构中不能起独立限制运动作用的约束。18.划分机构杆组时应先按低的杆组级别考虑,机构级别按杆组中的最高级别确定。19.机构运动简图是用简单的线条和规定的符号代表构件和运动副,并按一定比例绘制各运动副的相对位置,因而能阐明机构各构件间相对运动关系的简单图形。20.在图示平面运动链中,若构件1为机架,构件5为原动件,则成为Ⅲ级机构;若以构件2为机架,3为原动件,则成为Ⅱ级机构;若以构件4为机架,5为原动件,则成为Ⅳ级机构。三、选择题1.一种相似的机构构成不一样的机器。A (A)可以; (B)不能2.机构中的构件是由一种或多种零件所构成,这些零件间 产生任何相对运动。B(A)可...