1 解读德国“聪明鸟”的扑翼机构 (组成和动作原理) 自从电视台播放了德国人“聪明鸟”的飞行录像后,它一直在吸引着我
为此,我曾无数次地观看了由老鹰先生提供的录像资料
一直在关注着该鸟扑翼机构的组成和动作原理
今天想就该鸟的组成和动作原理做一解读,以愿与有兴趣的社友共同讨论
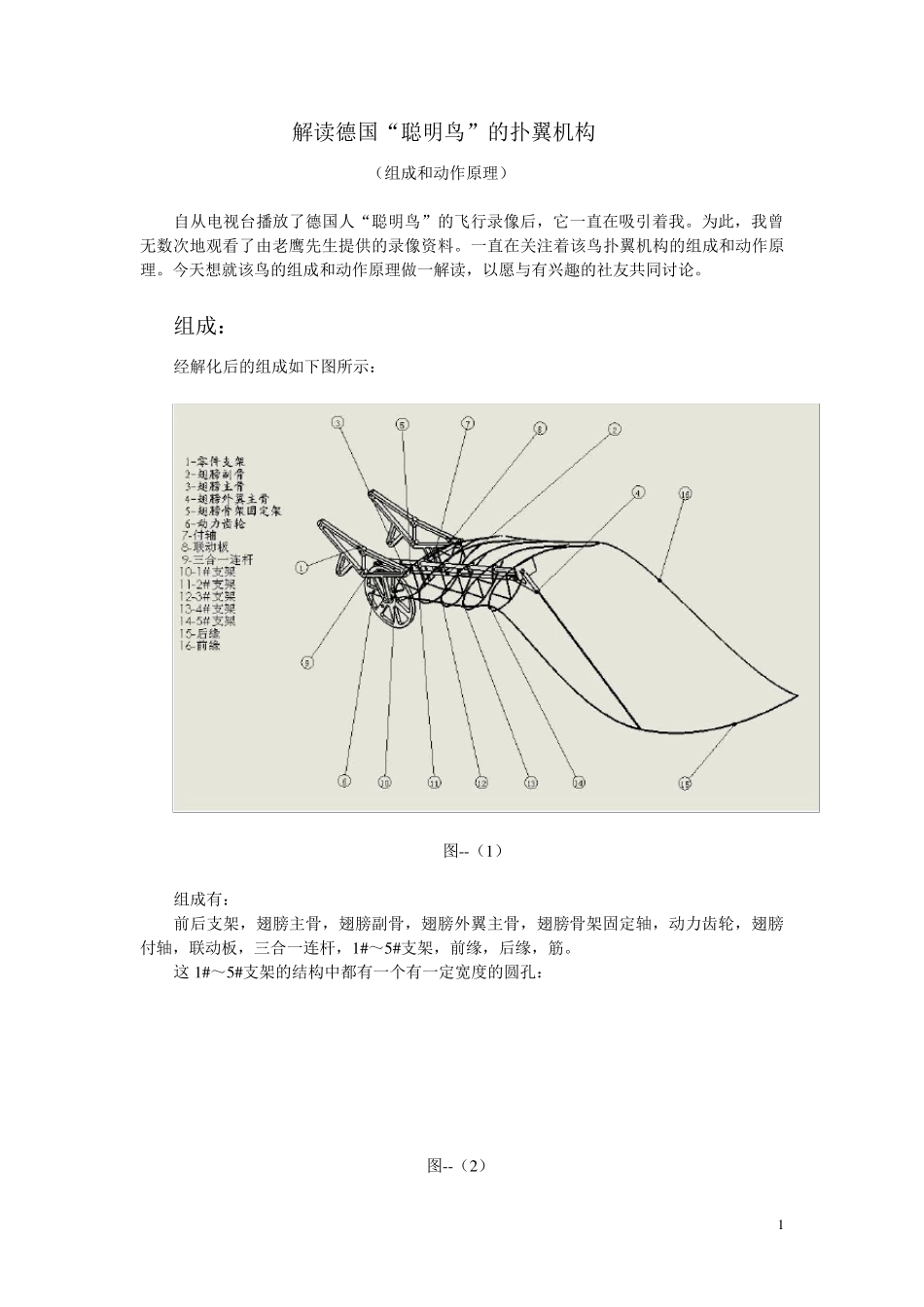
组成: 经解化后的组成如下图所示: 图--(1 ) 组成有: 前后支架,翅膀主骨,翅膀副骨,翅膀外翼主骨,翅膀骨架固定轴,动力齿轮,翅膀付轴,联动板,三合一连杆,1 #~5 #支架,前缘,后缘,筋
这 1 #~5 #支架的结构中都有一个有一定宽度的圆孔: 图--(2 ) 2 它的直径与翅膀主骨的直径相等,用来与翅膀主骨作同轴配合
1 #~5 #支架的前缘端点与前缘构件焊合,后缘端点与后缘构件焊合
联动板与筋构成一个整体(图中绘成了两个构件),筋与1 #~5 #支架的合适位置焊合在一起
付翼主骨的外端点焊合在一起
如此,整个翅膀的所有构件就组成了一个整体
动作原理: 为了便于叙述,将 5 #支架左侧的翅膀称为主翼,右侧部分称为副翼
整个翅膀的动作由三部分作成: 1
主翼的扑打动作; 2
副翼的扑打动作; 3
主付翼的扭转动作
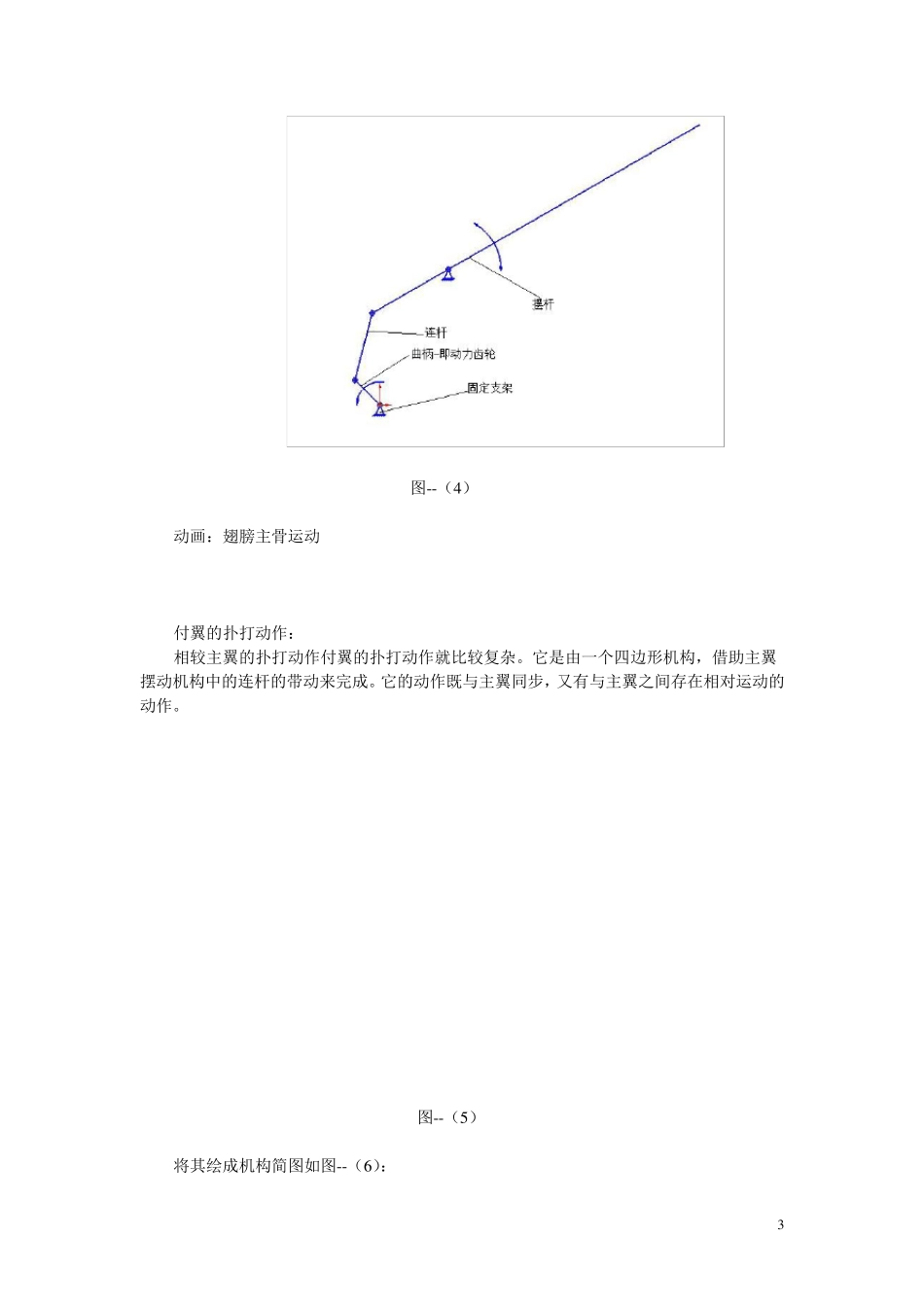
主翼的扑打动作: 其实,主翼的扑打动作是由一个简单的四连杆机构就可以完成: 主翼的扑打动作: 图--(3 ) 它由动力齿轮带动连杆,连杆带动翅膀主骨摆动翅膀
如果将其绘成机构简图,如图--(4 )所示: 3 图--(4 ) 动画:翅膀主骨运动 付翼的扑打动作: 相较主翼的扑打动作付翼的扑打动作就比较复杂
它是由一个四边形机构,借助主翼 摆动机构中的连杆的带动来完成
它的动作既与主翼同步,又有与主翼之间存在相对运动的动作
图--(5 ) 将其绘成机构简图如图--(6 ): 4 图--(6 ) 在图--(4 )中三合一连杆是由三个构件组成的:主连杆,副连杆,左连