一个坐标系的坐标变换为另一种坐标系的坐标的法则
由于交流异步电动机的电压、电流、磁通和电磁转矩各物理量之间是相互关联的强耦合,并且其转矩正比与主磁通与电流,而这两个物理量是随时间变化的函数,在异步电机数学模型中将出现两个变量的乘积项,因此,又为多变量,非线性系统(关键是有一个复杂的电感矩阵),这使得建立异步电动机的准确数学模型相当困难
为了简化电机的数学模型,需从简化磁链入手
解决的思路与基本分析:1
已知,三相( ABC )异步电动机的定子三相绕组空间上互差 120 度,且通以时间上互差 120度的三相正弦交流电时,在空间上会建立一个角速度为的旋转磁场
又知,取空间上互相垂直的(, )两相绕组,且在绕组中通以互差 90 度的两相平衡交流电流时,也能建立与三相绕组等效的旋转磁场
此时的电机数学模型有所简化
还知, 直流电机的磁链关系为:F---励磁绕组 轴线---主磁通的方向,即轴线在 d 轴上,称为直轴(Direct axis)
A---电枢绕组 轴线---由于电枢绕组是旋转的,通过电刷馈入的直流电产生电枢磁动势,其轴线始终被限定在 q 轴,即与 d 轴成 90 度,称为交轴(Quadrature axis)
由于 q 轴磁动势与 d 轴主磁通成正交,因此电枢磁通对主磁通影响甚微
换言之,主磁通唯一地由励磁电流决定,由此建立的直流电机的数学模型十分简化
如果能够将三项交流电机的物理模型等效的变换成类似的模型,分析和控制就变得大大简单了
电机模型彼此等效的原则:不同坐标系下产生的磁动势(大小、旋转)完全一致
关于旋转磁动势的认识:1) 产生旋转磁动势并不一定非要三相绕组不可
结论是:除了单相电机之外,两相、三相或四相等任意对称(空间)的多相绕组,若通以平衡的多相电流,都可产生旋转磁动势
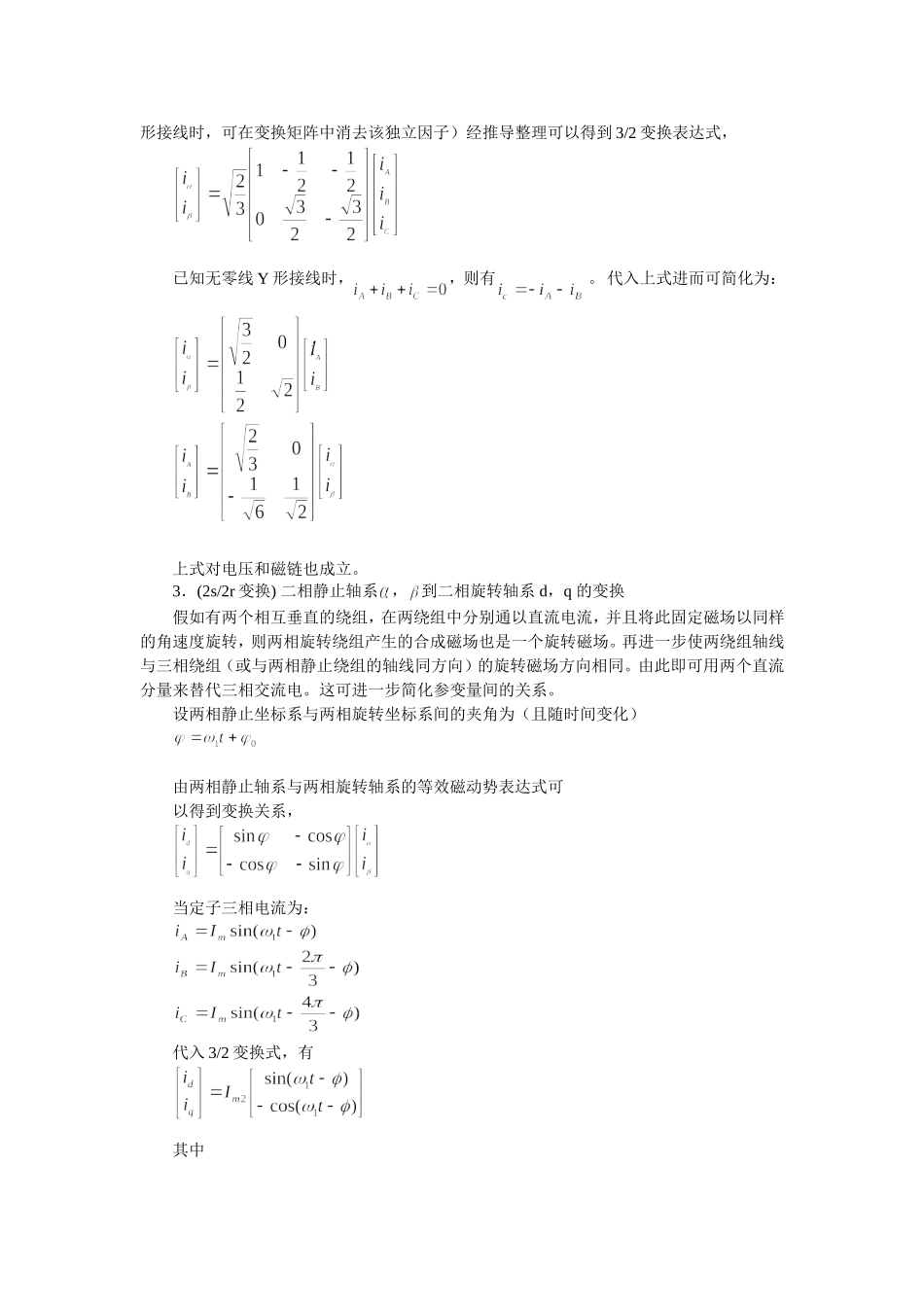
根据这一道理,利用其在空间上互差 90 度的静止绕组,并通以时间上互差 90 度