1 欧姆龙学习总结 1、 软件安装:按照安装包“1 安装指南”步骤安装完成,此版本软件为 9
0,只有 9
1版本以上的才可以使用 RS232 下载线
升级软件为 9
1 版本,点击安装包-升级包,选择”Cmn1004_0402setup”安装,升级为 9
卸载有专用卸载软件(官方下载)
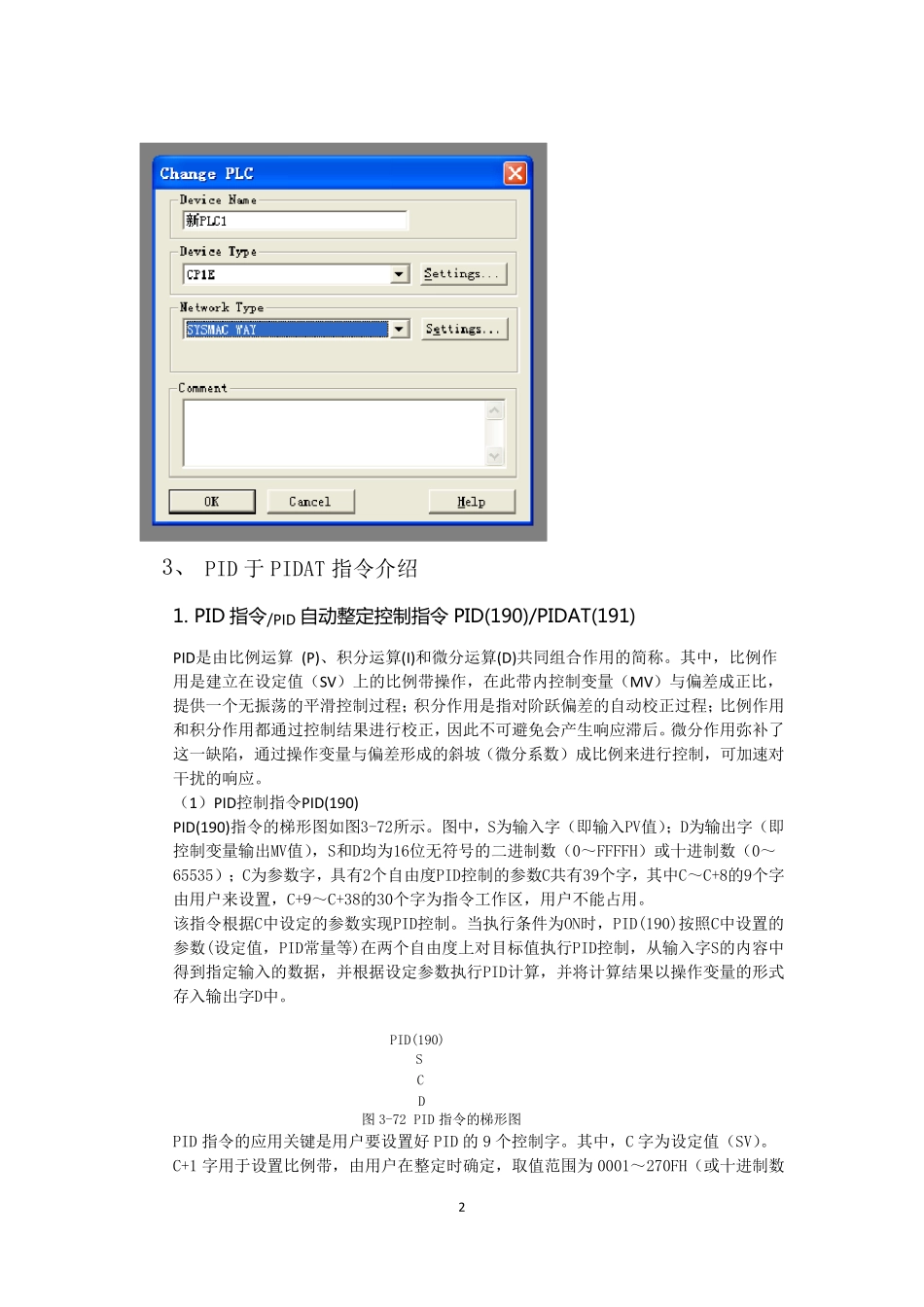
2、 打开软件-新建-命名程序名字、选择匹配的 plc 机型(CP1E-n30dr-a),“Setting”CPU 类型设置为 N30
选择下载方式
RS232对应 Network Type 设置为 “SYSMAC WAY,”
2 3、 PID 于 PIDAT 指令介绍 1
PID 指 令/PID 自动整定控制指 令 PID(190)/PIDAT(191) PID是由比例运算 (P)、积分运算(I)和微分运算(D)共同组合作用的简称
其中,比例作用是建立在设定值(SV)上的比例带操作,在此带内控制变量(MV)与偏差成正比,提供一个无振荡的平滑控制过程;积分作用是指对阶跃偏差的自动校正过程;比例作用和积分作用都通过控制结果进行校正,因此不可避免会产生响应滞后
微分作用弥补了这一缺陷,通过操作变量与偏差形成的斜坡(微分系数)成比例来进行控制,可加速对干扰的响应
(1)PID控制指令PID(190) PID(190)指令的梯形图如图3-72所示
图中,S为输入字(即输入PV值);D为输出字(即控制变量输出MV值),S和D均为16位无符号的二进制数(0~FFFFH)或十进制数(0~65535);C为参数字,具有2个自由度PID控制的参数C共有39个字,其中C~C+8的9个字由用户来设置,C+9~C+38的30个字为指令工作区,用户不能占用
该指令根据C中设定的参数实现PID控制
当执行条件为ON时,PID(190)按照C中设置的参数(设定值,PID常量等)在两个自由度上对目标