第一章 步进电机控制原理 步进电机是一种将电脉冲信号变换成角位移或直线位移的常用电气执行元件,具有步进数可控、运行平稳、价格便宜等优点
步进电机转子的位移与脉冲数成正比,因而其转速与脉冲频率成正比,而不受电源电压、负载大小及环境条件等影响
每一个脉冲信号可使步进电机旋转一个固定的角度前进一步,这个角度即为步距角
脉冲的数量决定了旋转的总角度,脉冲的频率决定了旋转的速度,方向信号决定了旋转的方向
步进电机的工作方式与电动机的结构和种类密切相关,从结构上看,步进电机分为三相、四相、五相等类型,常用的是三相步进电机
三相步进电机的工作方式有三相单三拍、三相双三拍和三相六拍3种
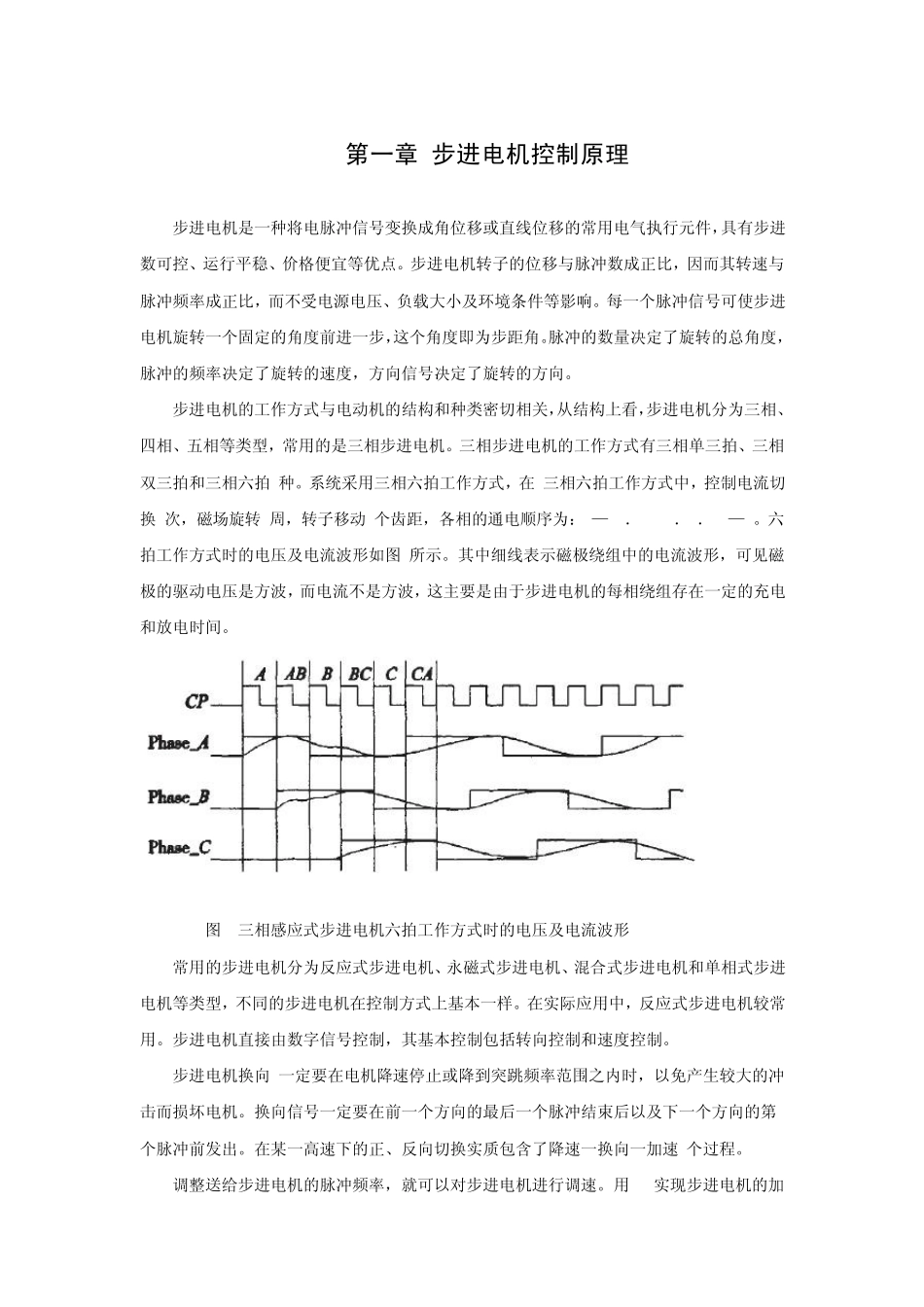
系统采用三相六拍工作方式,在=三相六拍工作方式中,控制电流切换6次,磁场旋转1周,转子移动1个齿距,各相的通电顺序为:A—AB.B-BC.C.CA—A
六拍工作方式时的电压及电流波形如图1所示
其中细线表示磁极绕组中的电流波形,可见磁极的驱动电压是方波,而电流不是方波,这主要是由于步进电机的每相绕组存在一定的充电和放电时间
图1 三相感应式步进电机六拍工作方式时的电压及电流波形 常用的步进电机分为反应式步进电机、永磁式步进电机、混合式步进电机和单相式步进电机等类型,不同的步进电机在控制方式上基本一样
在实际应用中,反应式步进电机较常用
步进电机直接由数字信号控制,其基本控制包括转向控制和速度控制
步进电机换向,一定要在电机降速停止或降到突跳频率范围之内时,以免产生较大的冲击而损坏电机
换向信号一定要在前一个方向的最后一个脉冲结束后以及下一个方向的第1个脉冲前发出
在某一高速下的正、反向切换实质包含了降速一换向一加速3个过程
调整送给步进电机的脉冲频率,就可以对步进电机进行调速
用PLC实现步进电机的加减速控制,实际上就是控制发送脉冲的频率
加速时,使脉冲频率增高,减速时降低
理想的加速曲线一般为指