《自动控制理论 第2 版》习题参考答案 第二章 2-1 (a) 1121211212212122112CSRRRRCSRRRRRRCSRRRCSRRsUsU (b) 1)(12221112212121sCRCRCRsCCRRsUsU 2-2 (a) RCsRCssUsU112 (b) 141112CsRRRsUsU (c) 141112CsRRRsUsU 2-5 2
23ddui 2-11 系统信号流程图如图A-2-2 所示
图A-2-2 题2-11 系统信号流程图 2154214212654212215421421321111HHGGGGGGGHGGGGGsRsCHHGGGGGGGGGGsRsC 第三章 3-6 系统在单位斜坡输入下的稳态误差为 nsre2 加入比例—微分环节后 nnssrnnnnnnnassEimessRsRsssassCsRsEsRssassRsGsGassCsGsCassRsC21222111102222222 可见取na2,可使0sre 3-7 588
19,598
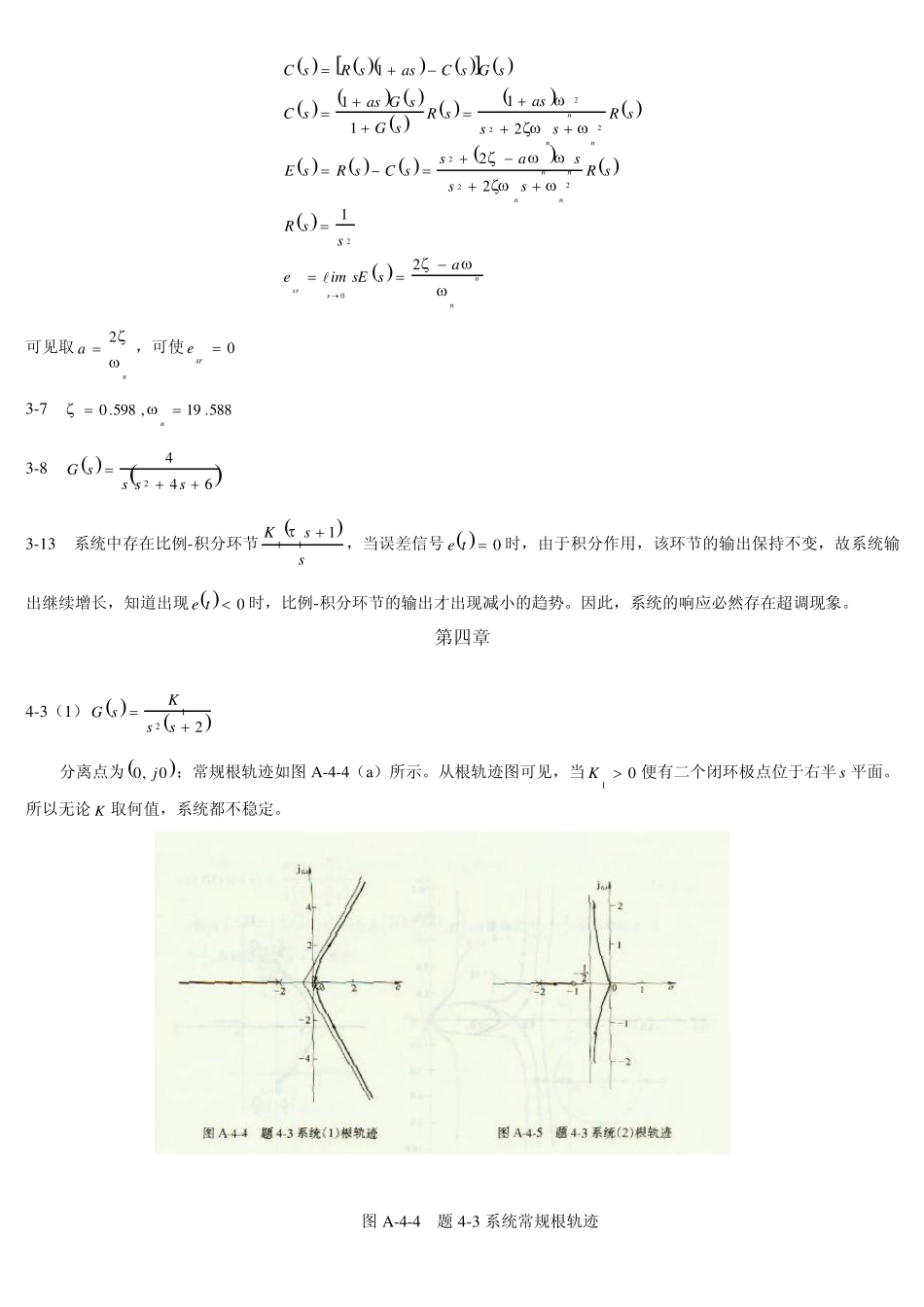
0n 3-8 6442ssssG 3-13 系统中存在比例-积分环节ssK111,当误差信号 0te时,由于积分作用,该环节的输出保持不变,故系统输出继续增长,知道出现 0te时,比例-积分环节的输出才出现减小的趋势
因此,系统的响应必然存在超调现象