普通高等教育“十一五”国家级规划教材 全国高等专科教育自动化类专业规划教材 《自动控制原理》习题答案 主编:陈铁牛 机械工业出版社 第一章 习题答案 1-1 1-2 1-3 闭环控制系统主要由被控对象,给定装置,比较、放大装置,执行装置,测量和变送装置,校正装置等组成
被控对象:指要进行控制的设备和过程
给定装置:设定与被控量相对应给定量的装置
比较、放大装置:对给定量与测量值进行运算,并将偏差量进行放大的装置
执行装置:直接作用于控制对象的传动装置和调节机构
测量和变送装置:检测被控量并进行转换用以和给定量比较的装置
校正装置:用以改善原系统控制性能的装置
题1-4 答:(图略) 题1-5 答:该系统是随动系统
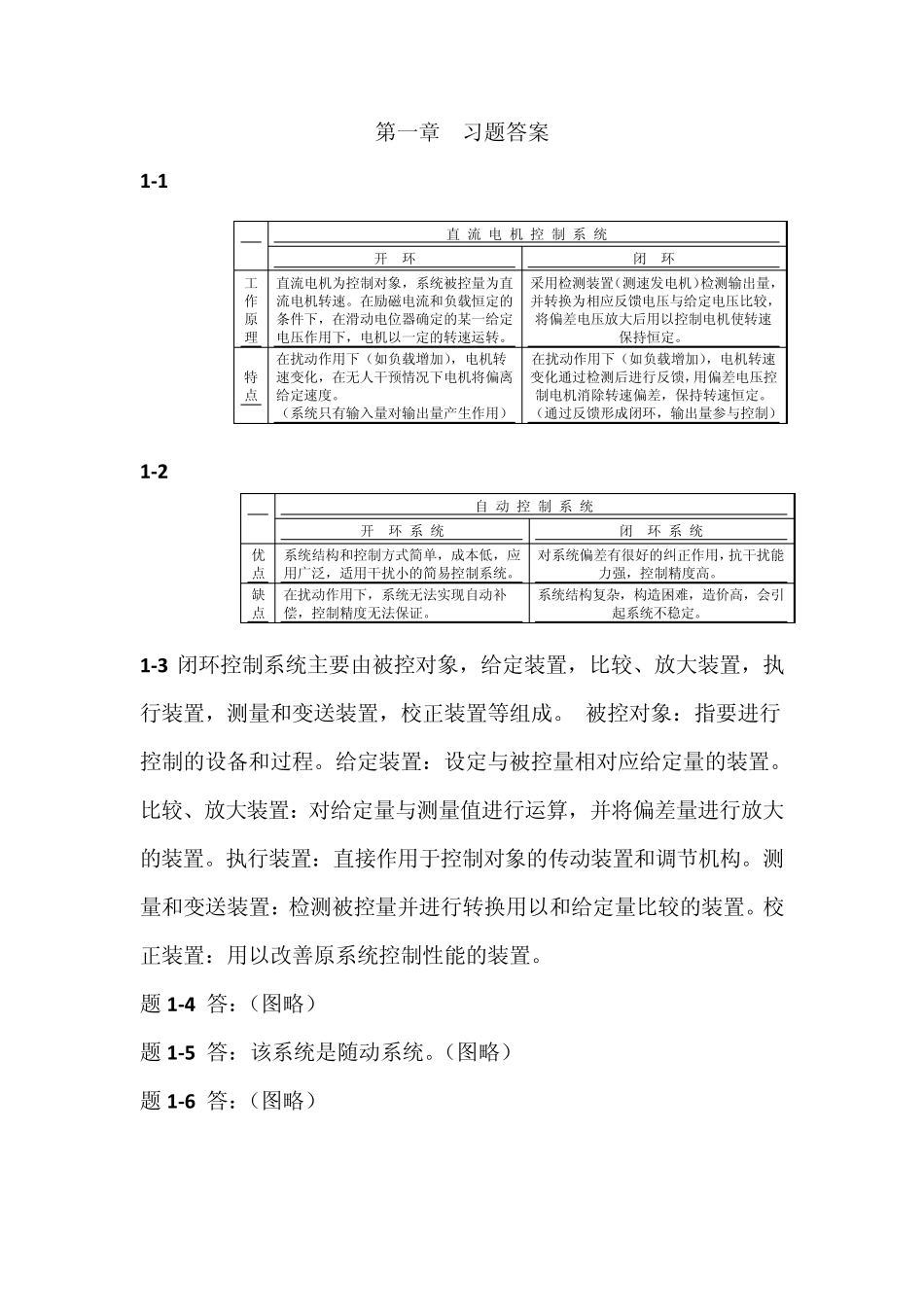
(图略) 题1-6 答:(图略) 直 流 电 机 控 制 系 统 开 环 闭 环 工 作 原理 直流电机为控制对象,系统被控量为直流电机转速
在励磁电流和负载恒定的条件下,在滑动电位器确定的某一给定电压作用下,电机以一定的转速运转
采用检测装置(测速发电机)检测输出量,并转换为相应反馈电压与给定电压比较,将偏差电压放大后用以控制电机使转速保持恒定
特 点 在扰动作用下(如负载增加),电机转速变化,在无人干预情况下电机将偏离给定速度
(系统只有输入量对输出量产生作用) 在扰动作用下(如负载增加),电机转速变化通过检测后进行反馈,用偏差电压控制电机消除转速偏差,保持转速恒定
(通过反馈形成闭环,输出量参与控制) 自 动 控 制 系 统 开 环 系 统 闭 环 系 统 优点 系统结构和控制方式简单,成本低,应用广泛,适用干扰小的简易控制系统
对系统偏差有很好的纠正作用,抗干扰能力强,控制精度高
缺 点 在扰动作用下,系统无法实现自动补偿,控制精度无法保证
系统结构复杂,构造困难,造价高,会引起系统不稳定
第二章习题答案 题 2-1 解: (1)F(