LMS 自适应算法 LMS自适应滤波算法是一种广泛使用的算法,下面从LMS算法的结构和运算入手研究该算法
1 最小均方算法的结构和运算概述 LMS算法是自适应滤波算法
一般来说,它包含两个基本过程: (1)滤波过程(filtering process)包括计算线性滤波器输出对输入信号的响应以及通过比较输出结果与期望响应产生估计误差
(2)自适应过程(adaptiv e process)根据估计误差自动调整滤波器参数
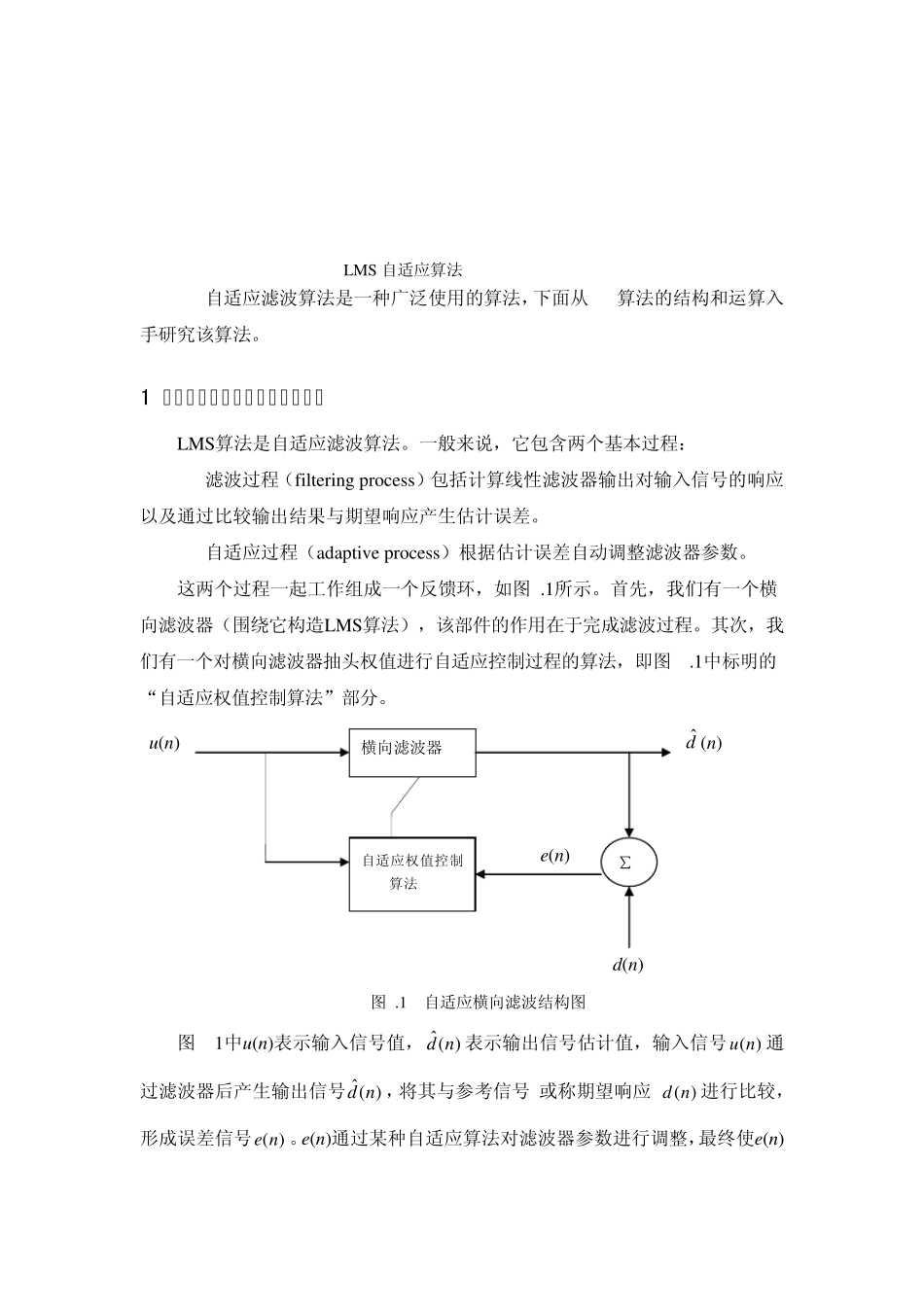
这两个过程一起工作组成一个反馈环,如图1
首先,我们有一个横向滤波器(围绕它构造LMS算法),该部件的作用在于完成滤波过程
其次,我们有一个对横向滤波器抽头权值进行自适应控制过程的算法,即图1
1中标明的“自适应权值控制算法”部分
u(n) dˆ (n) - e(n) + d(n) 图1
1 自适应横向滤波结构图 图1
1中u(n)表示输入信号值,)(ˆ nd表示输出信号估计值,输入信号)(nu通过滤波器后产生输出信号)(ˆ nd,将其与参考信号(或称期望响应))(nd进行比较,形成误差信号)(ne
e(n)通过某种自适应算法对滤波器参数进行调整,最终使e(n)横向滤波器 自适应权值控制算法 ∑ 的均方值最小
在设计时不需要事先知道关于输入信号和噪声的统计特性的知识,它能够在自己的工作过程中逐渐“了解”或估计出所需的统计特性,并以此为依据自动调整自己的参数,最终达到最佳滤波效果
一旦输入信号的统计特性发生变化,它又能够跟踪这种变化,使滤波器性能重新达到最佳
2 最速下降概述 最速下降算法是一种基于梯度的自适应方法,这种方法是理解各种基于梯度的自适应方法的基础
它可用反馈系统来表示,滤波器的计算是一步一步迭代进行的
在平稳过程这个特殊情况下,给定任意初始抽头权向量,问题的解将随迭代次数的增加而改善
值得一提是,在适当条件下,上述方法的解收敛于维纳