专业资料分享课题七皮带运输机 PLC 控制系统、实训目的1.熟悉步进顺控指令的编程方法;2.掌握选择性流程程序的编制;3.掌握皮带运输机的程序设计及其外部接线二、实训器材1
可编程控制器 1 台(FX2N-48MR);2.皮带运输机模拟显示模块 1 块(带指示灯、接线端口及按钮等)3
实训控制台 1 个;4
电工常用工具 1 套;5
手持式编程器或计算机 1 台;6
连接导线若干
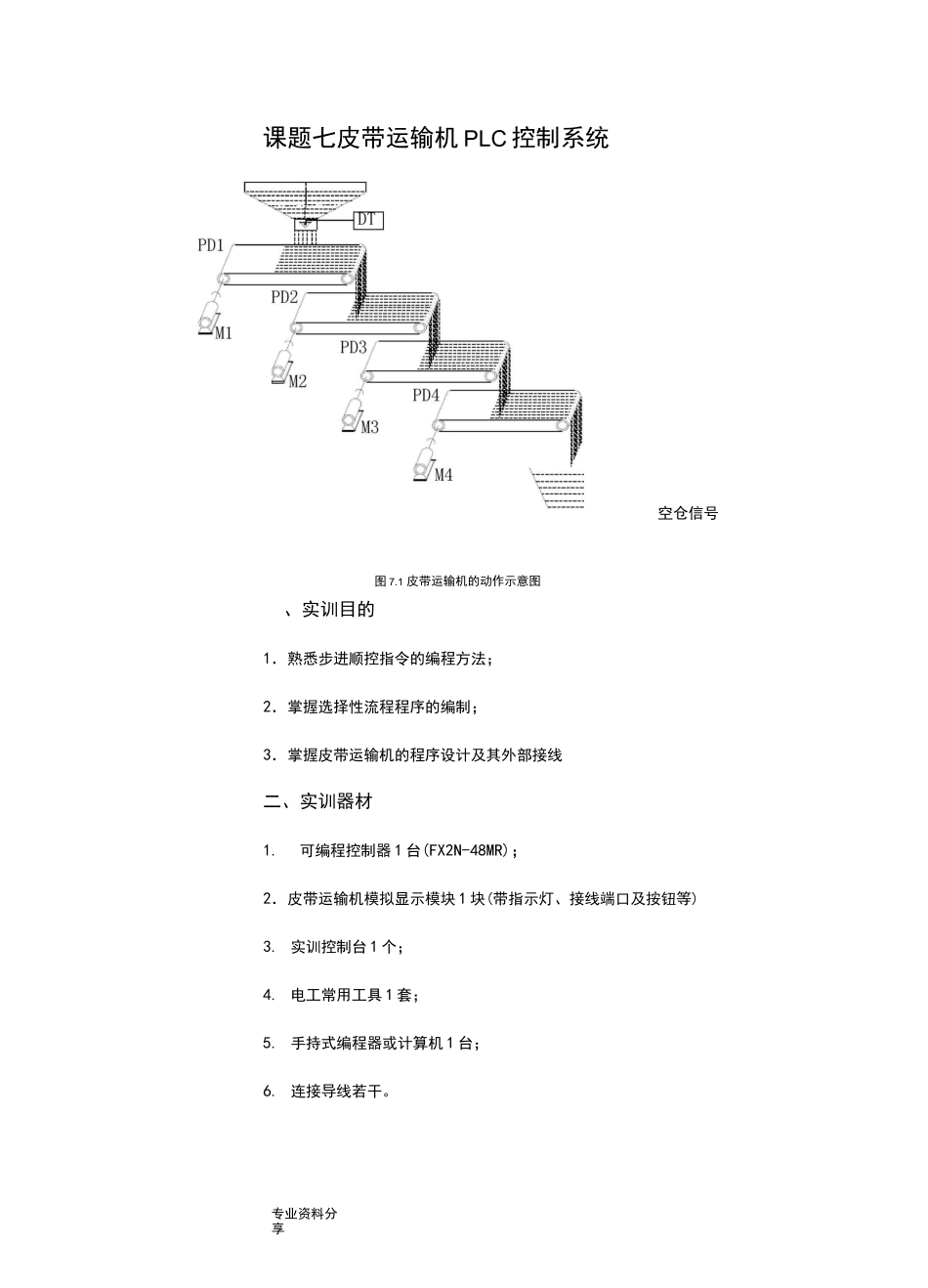
空仓信号图 7
1 皮带运输机的动作示意图专业资料分享三、实训要求设计一个用 PLC 控制的皮带运输机的控制系统
其控制要求如下:在建材、化工、机械、冶金、矿山等工业生产中广泛使用皮带运输系统运送原料或物品
供料由电阀 DT 控制,电动机 M1、M2、M3、M4 分别用于驱动皮带运输线 PD1、PD2、PD3、PD4
储料仓设有空仓和满仓信号,其动作示意简图如图 7
1 所示,其具体要求如下:1
正常起动,仓空或按自动起动按钮时的起动顺序为 M1、DT、M2、M3、M4,间隔时间 5s;2
正常停止,为使皮带上不留物料,要求顺物料流动方向按一定时间间隔顺序停止,即正常停止顺序为 DT、M1、M2、M3、M4,间隔时间5s;3
故障后的起动,为避免前段皮带上造成物料堆积,要求按物料流动相反方向按一定时间间隔顺序起动,即故障后的起动顺序为 M4、M3、M2、M1、DT,间隔时间 10s;4
紧急停止,当出现意外时,按下紧急停止按钮,则停止所有电动机和电磁阀5
具有点动功能
四、软件程序1
I/O 点分配专业资料分享X0:自动/手动转换;XI:自动位起动;X2:正常停止;X3:紧急停止;X4:点动 DT 电磁阀;X5:点动 M1;X6:点动 M2;X7:点动M3;X10:点动 M4;X11:满仓信号;X12:空仓信号;X13:故障起动YO:DT 电磁阀;Y1:M1 电动机;Y2:M2