《自动控制原理》课程设计(简明)任务书——供 09 级电气工程与自动化专业学生用引言:《自动控制原理》课程设计是该课程的一个重要教学环节,既有别于毕业设计,更不同于课堂教学
它主要是培育学生统筹运用自动控制原理课程中所学的理论知识,掌握反馈控制系统的基本理论和基本方法,对工程实际系统进行完整的全面分析和综合
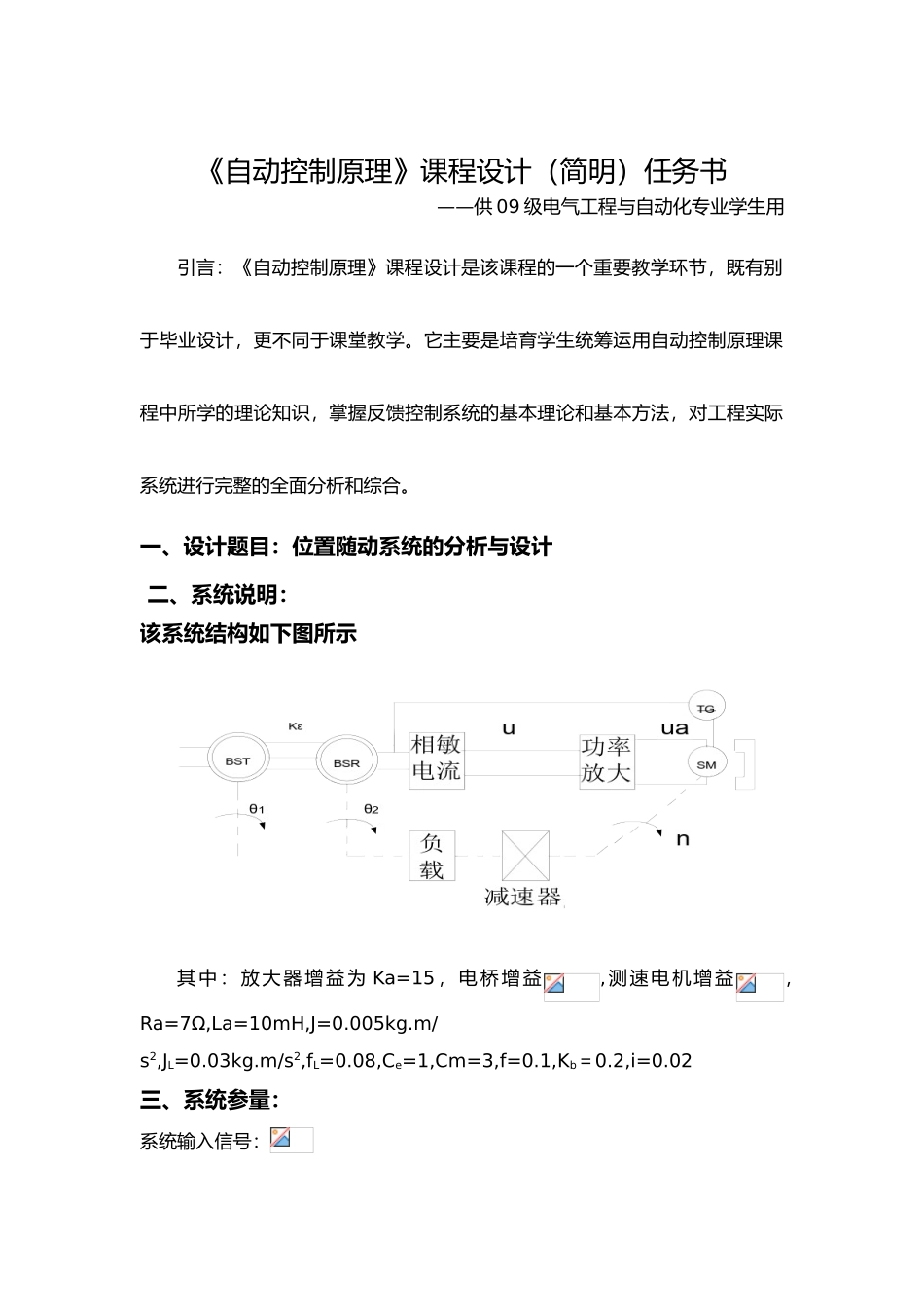
一、设计题目:位置随动系统的分析与设计 二、系统说明:该系统结构如下图所示其中:放大器增益为 Ka=15,电桥增益,测速电机增益,Ra=7Ω,La=10mH,J=0
m/s2,JL=0
m/s2,fL=0
08,Ce=1,Cm=3,f=0
1,Kb=0
02三、系统参量:系统输入信号:系统输出信号:四、设计指标:设定:输入为 r(t)=a+bt(其中:a=10, b=5) 在保证静态指标(ess≤0
3)的前提下, 要求动态期望指标:σ p≤15﹪﹪;ts≤5sec;五、基本要求:1
建立系统数学模型——传递函数;2
利用根轨迹方法分析系统:(1) 作原系统的根轨迹草图;(2) 分析原系统的性能,当原系统的性能不满足设计要求时,则进行系统校正
利用根轨迹方法综合系统:(1) 画出串联校正结构图,分析并选择串联校正的类型(微分、积分和微分-积分校正);(2) 确定校正装置传递函数的参数;(3) 画出校正后的系统的根轨迹图,并校验系统性能;若不满足,则重新确定校正装置的参数
完成系统综合前后的有源物理模拟电路;六、课程设计报告:1、课程设计计算说明书一份;2、原系统组成结构原理图一(自绘);3、系统分析,综合用根轨迹图一;4、系统综合前后的模拟图各一;5、总结(包括课程设计过程中的学习体会与收获、对本次课程设计的认识等容);6、提供参考资料与文献;7、排版格式完整、报告语句通顺、封面装帧成册摘要随动系统是指系统的输出以一定的精度和