智能弧焊机器人的运动学建模摘 要:对智能弧焊机器人的实时轨迹跟踪问题,提出了一种新的运动学建模:焊缝切线法
该方法是根据焊缝跟踪系统推断焊缝的弯曲程度,确定机器人的运动学模型
用该方法建立了四轮移动机器人的运动方式和机器人终端效应器(焊枪)的运动方式之间的关系
试验结果表明,该模型具有良好的控制特性和精确性,能满足焊接工程应用的要求
关键词:移动机器人; 电弧传感器; 运动学模型; 电弧焊 一、序言 焊接技术作为一门综合性应用技术,从来都是随着科学技术的整体进步而进展的
近几十年来,随着自动化技术的进展,特别是机器人的进展,弧焊机器人如雨后春笋般涌现出来
通常,弧焊机器人广泛应用于工业焊接生产,极提高了焊接质量和效率
对于大量的非结构环境下的焊接制造过程,如造船、石化容器等,目前基本上处于有轨道的机械化和人工焊接状况
为了实现大型工件焊接自动化,国外开发了轮式小车依靠靠模和人工监控完成焊接制造,国利用改进的磁性轮式小车作为焊接生产移动机构
随着大型重要构件的焊接越来越多,仅仅依靠手工焊焊接是难以满足焊接质量和焊接效率的要求,因此开发具有智能化的弧焊机器人以取代人在危险恶劣环境下难以完成的工作,是人类梦寐以求的理想
文中着重通过对四轮移动机器人的运动分析,建立了一种新的运动学模型,其目的是为弧焊机器人的焊缝跟踪系统提供新的解决方法
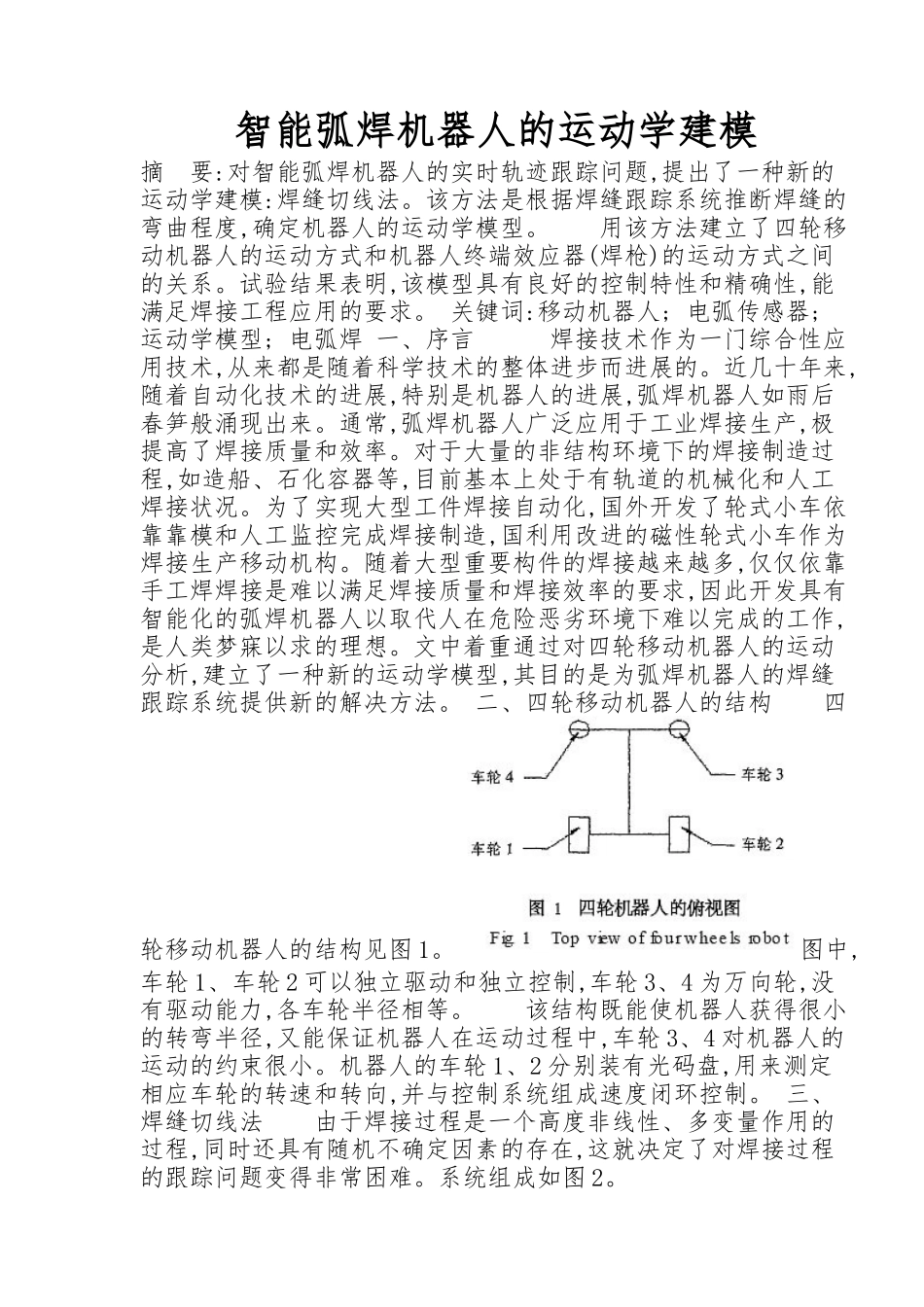
二、四轮移动机器人的结构 四轮移动机器人的结构见图 1
图中,车轮 1、车轮 2 可以独立驱动和独立控制,车轮 3、4 为万向轮,没有驱动能力,各车轮半径相等
该结构既能使机器人获得很小的转弯半径,又能保证机器人在运动过程中,车轮 3、4 对机器人的运动的约束很小
机器人的车轮 1、2 分别装有光码盘,用来测定相应车轮的转速和转向,并与控制系统组成速度闭环控制
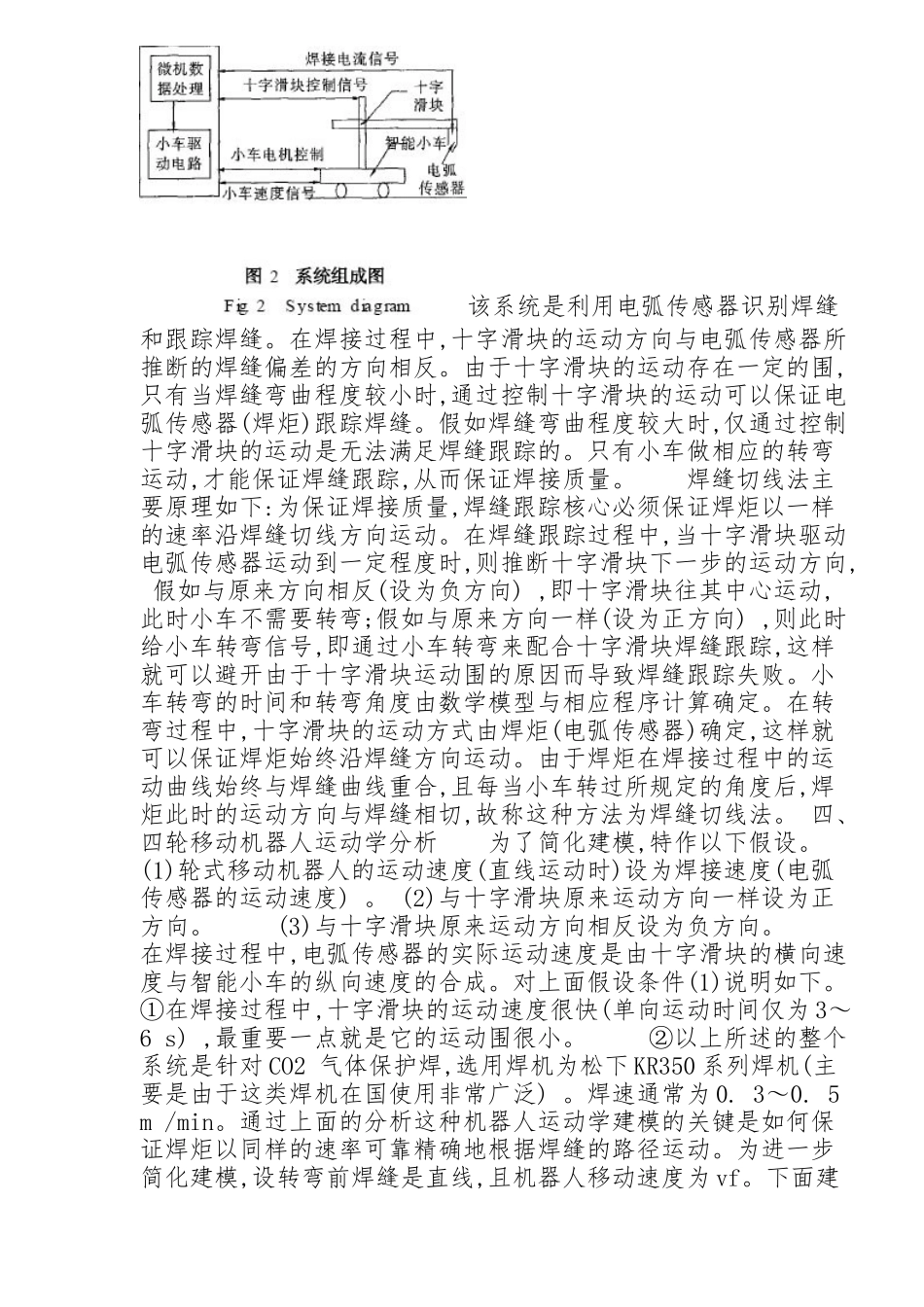
三、焊缝切线法 由于焊接过程是一个高度非线性、多变量作用的过程,同时还具有随