第一章 矿井提升机系统高仿真平台的概述1
1、系统简介矿井提升机系统自动控制高仿真平台以提高提升效率、节能降耗、安全运行为设计理念,针对沟通提升系统进行仿真设计
该系统完全模拟井底煤仓装载、定量称重和箕斗自动装载、井上煤仓卸载与提升机全自动提升过程
可分别实现提升机全自动运行控制和手动控制
在控制面板上还包括了信号系统和故障模拟功能,具备以太网通讯功能,可实现与集中控制平台的连接
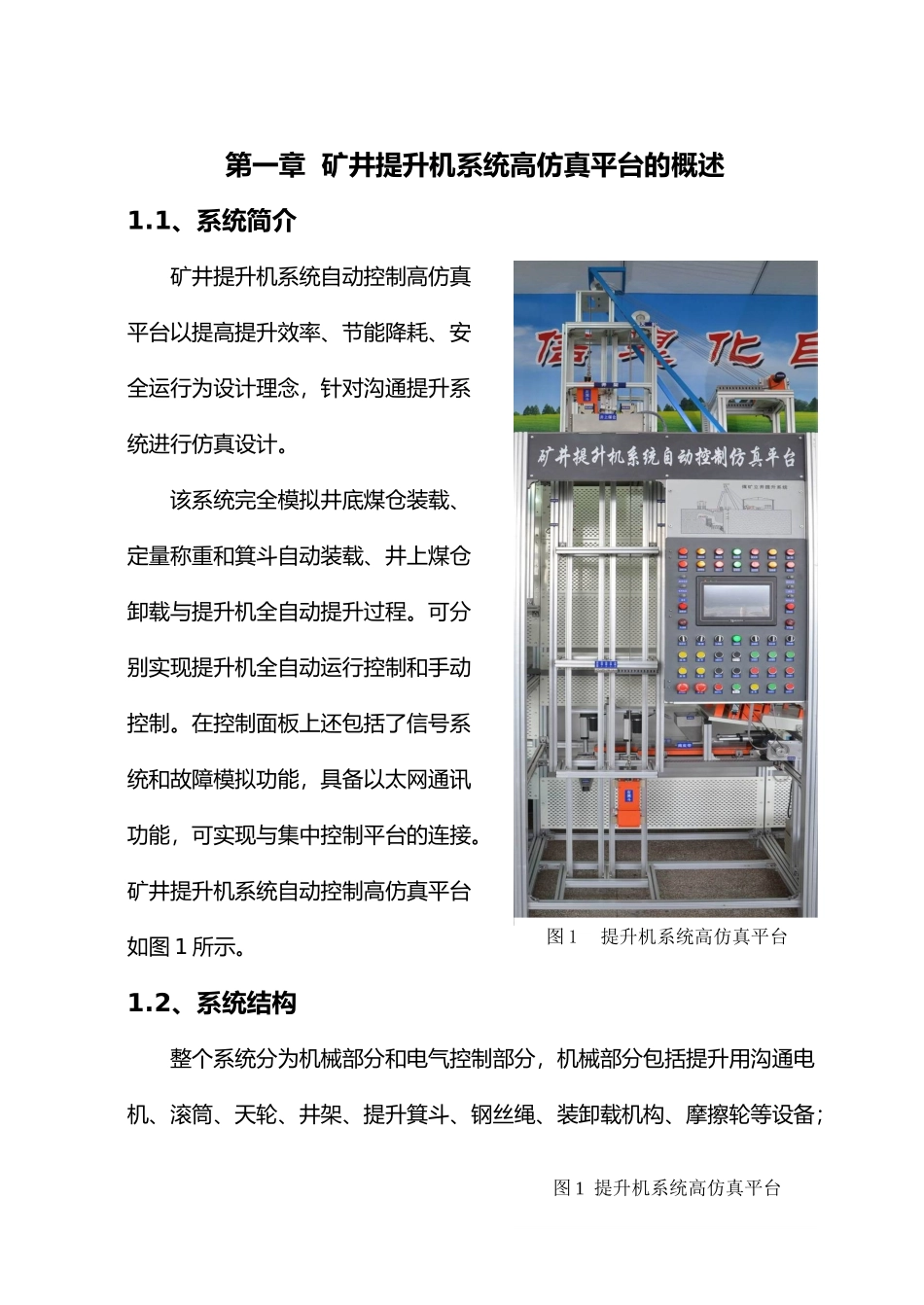
矿井提升机系统自动控制高仿真平台如图 1 所示
2、系统结构整个系统分为机械部分和电气控制部分,机械部分包括提升用沟通电机、滚筒、天轮、井架、提升箕斗、钢丝绳、装卸载机构、摩擦轮等设备;图 1 提升机系统高仿真平台图 1 提升机系统高仿真平台电气部分包括西门子 S7-300 PLC、变频器、位置传感器、轴角编码器、控制面板、触摸屏和控制软件等
3、运行方式用户可以在远程控制平台、触摸屏以与就地控制面板完成对系统的监控
综合考虑系统对于实时性、可靠性以与传输距离等的要求,监控网络采纳 MPI 网络与工业以太网相结合的形式
当设定为就地方式时,用户可在就地控制面板完成对提升机系统和装载系统的操作;集中方式分别对应触摸屏,实现提升机和装载皮带的一键启停控制;选择远程方式时,提升机和装载系统将根据上一级系统条件自动启停,或根据当前系统条件执行自动控制程序
4、工作原理矿井提升机系统自动控制高仿真平台的整个工作过程是由采煤机采地煤,经过运输皮带进入主煤仓,在由皮带运送到定量仓,最后进入箕斗提升机,完成了煤炭的装载过程
由主电机带动卷筒旋转,绕过天轮的钢丝绳连结箕斗上下运动,完成上下提升运动
提升机中的箕斗在上下提升运动过程中主要进过几个阶段:① 加速阶段,箕斗在装满煤后速度在不断增加这段时间很短;② 匀速阶段,箕斗在加速阶段后,速度达到额定速度后就不会再增加,一直以这个速度提升,这个过程时间较长