第五章习题解答5
1图杆受理想约束,在满足题意的约束条件下杆的位置可由杆与水平方向夹角所唯一确定
杆的自由度为1,由平衡条件:即mgy=0①变换方程y=2rcossin-=rsin2②故③代回①式即因在约束下是任意的,要使上式成立必须有:rcos2-=0④又由于cos=故cos2=代回④式得5
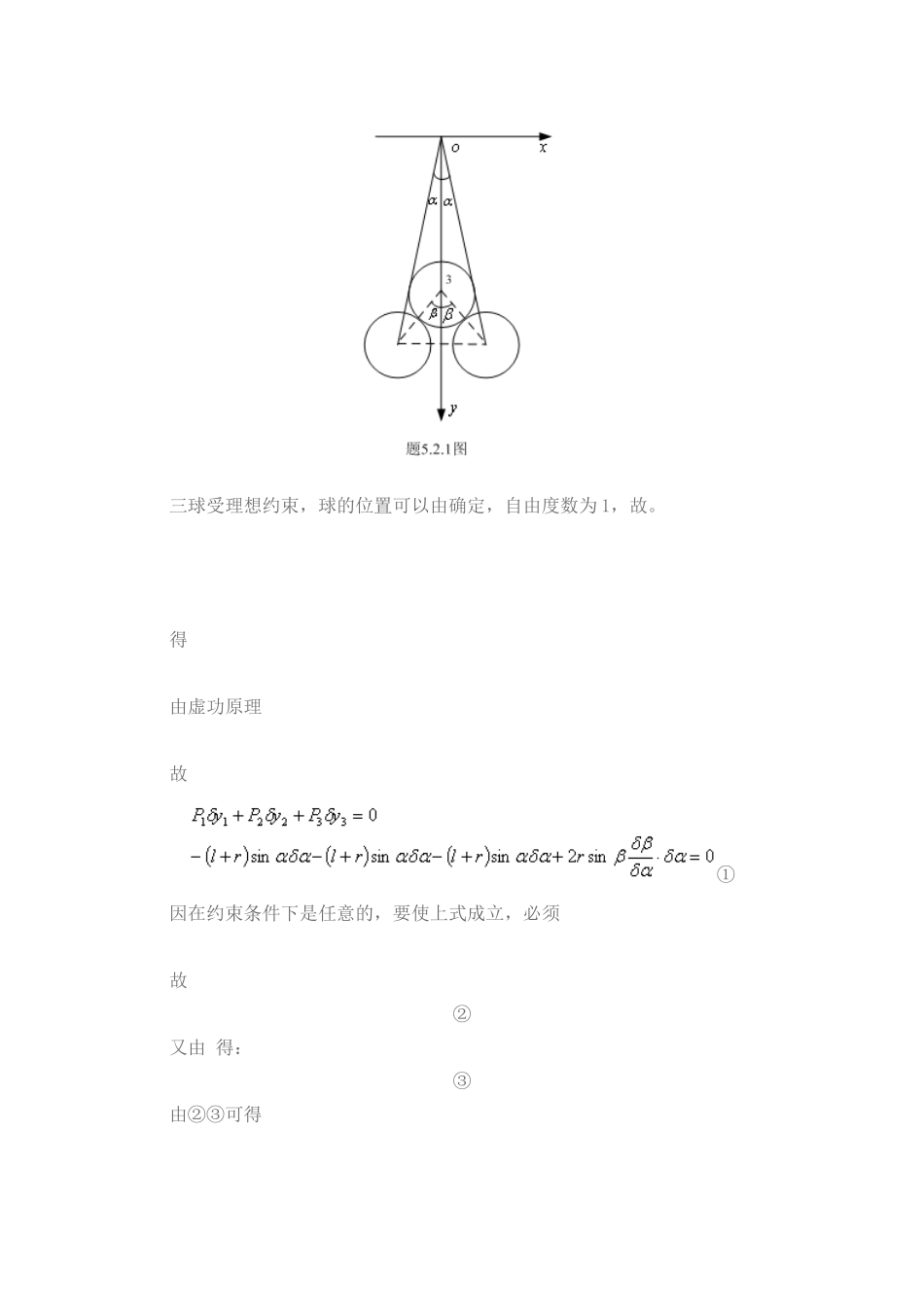
1图三球受理想约束,球的位置可以由确定,自由度数为1,故
得由虚功原理故①因在约束条件下是任意的,要使上式成立,必须故②又由得:③由②③可得5
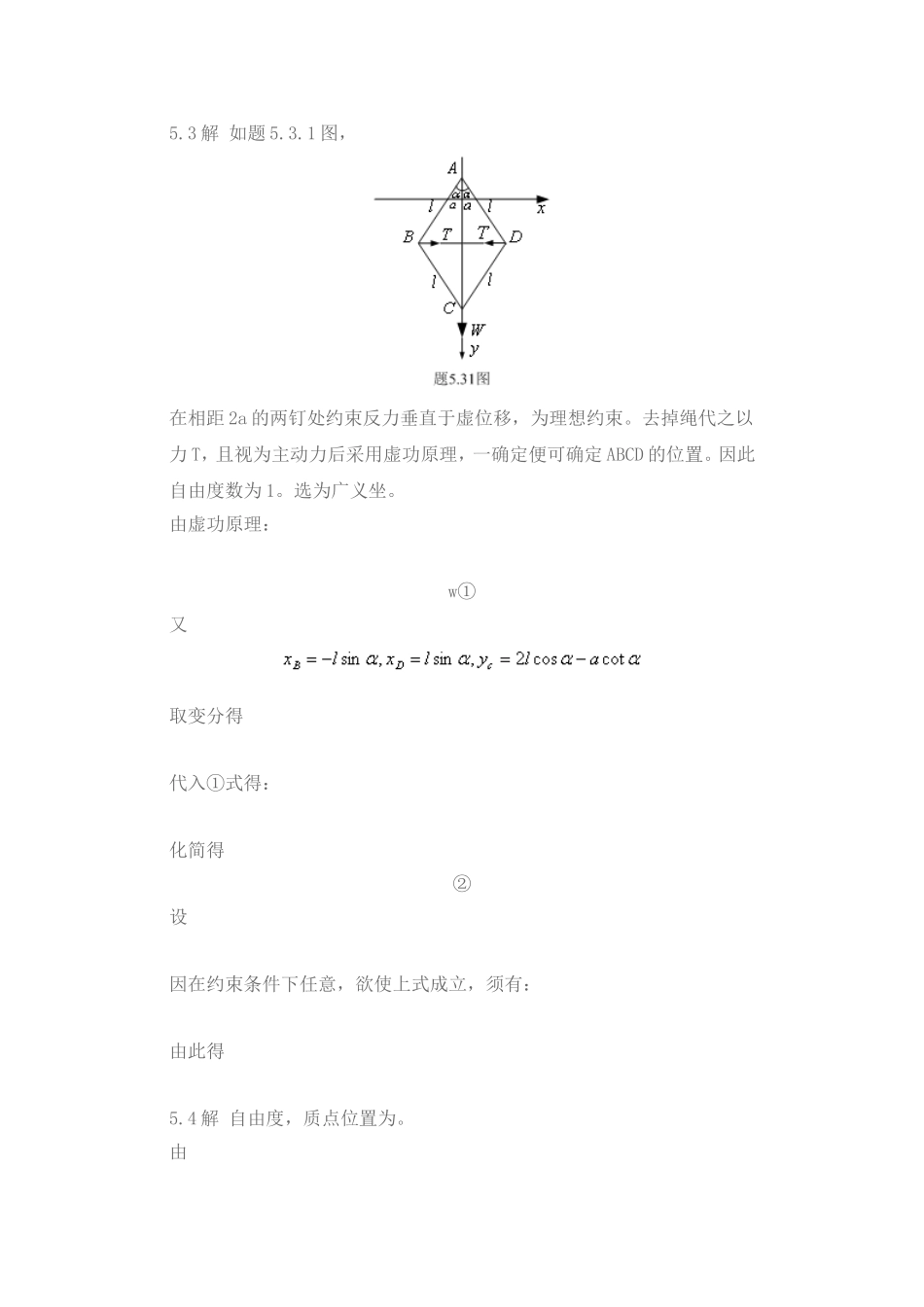
1图,在相距2a的两钉处约束反力垂直于虚位移,为理想约束
去掉绳代之以力T,且视为主动力后采用虚功原理,一确定便可确定ABCD的位置
因此自由度数为1
由虚功原理:w①又取变分得代入①式得:化简得②设因在约束条件下任意,欲使上式成立,须有:由此得5
4解自由度,质点位置为
由①由已知得故②约束方程③联立②③可求得或又由于故或5
1图按题意仅重力作用,为保守系
因为已知,故可认为自由度为1
选广义坐标,在球面坐标系中,质点的动能:由于所以又由于故取Ox为零势,体系势能为:故力学体系的拉氏函数为:5
平面运动,一个自由度
选广义坐标为,广义速度因未定体系受力类型,由一般形式的拉格朗日方程①在广义力代入①得:②在极坐标系下:③故将以上各式代入②式得5
1图又由于所以①取坐标原点为零势面②拉氏函数③代入保守系拉格朗日方程得代入保守系拉格朗日方程得5
8解:如图5
(1)由于细管以匀角速转动,因此=可以认为质点的自由度为1
(2)取广义坐标
(3)根据极坐标系中的动能取初始水平面为零势能面,势能:拉氏函数①(4),代入拉氏方程得:(5)先求齐次方程的解
②特解为故①式的通解为③在时:④⑤联立④⑤得将代回式③可得方程的解为:5