欧姆龙NX控制器与Sysmacstudio的电机配置方法欧姆龙NX控制器与Sysmacstudio的电机配置方法0
实际硬件连接2
Sysmacstudio配置2
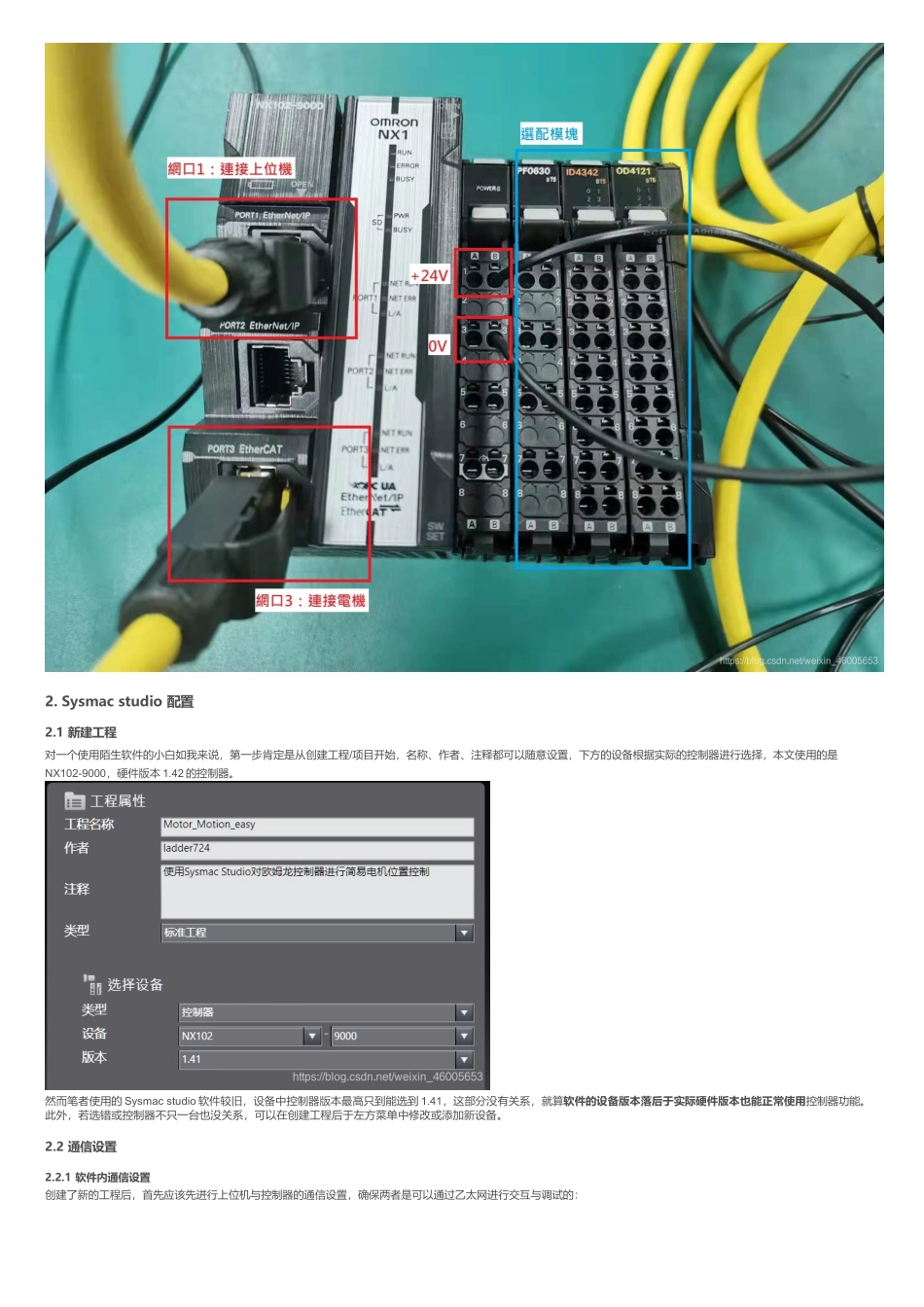
1新建工程2
2通信设置2
3硬件配置3
重启报错处理4
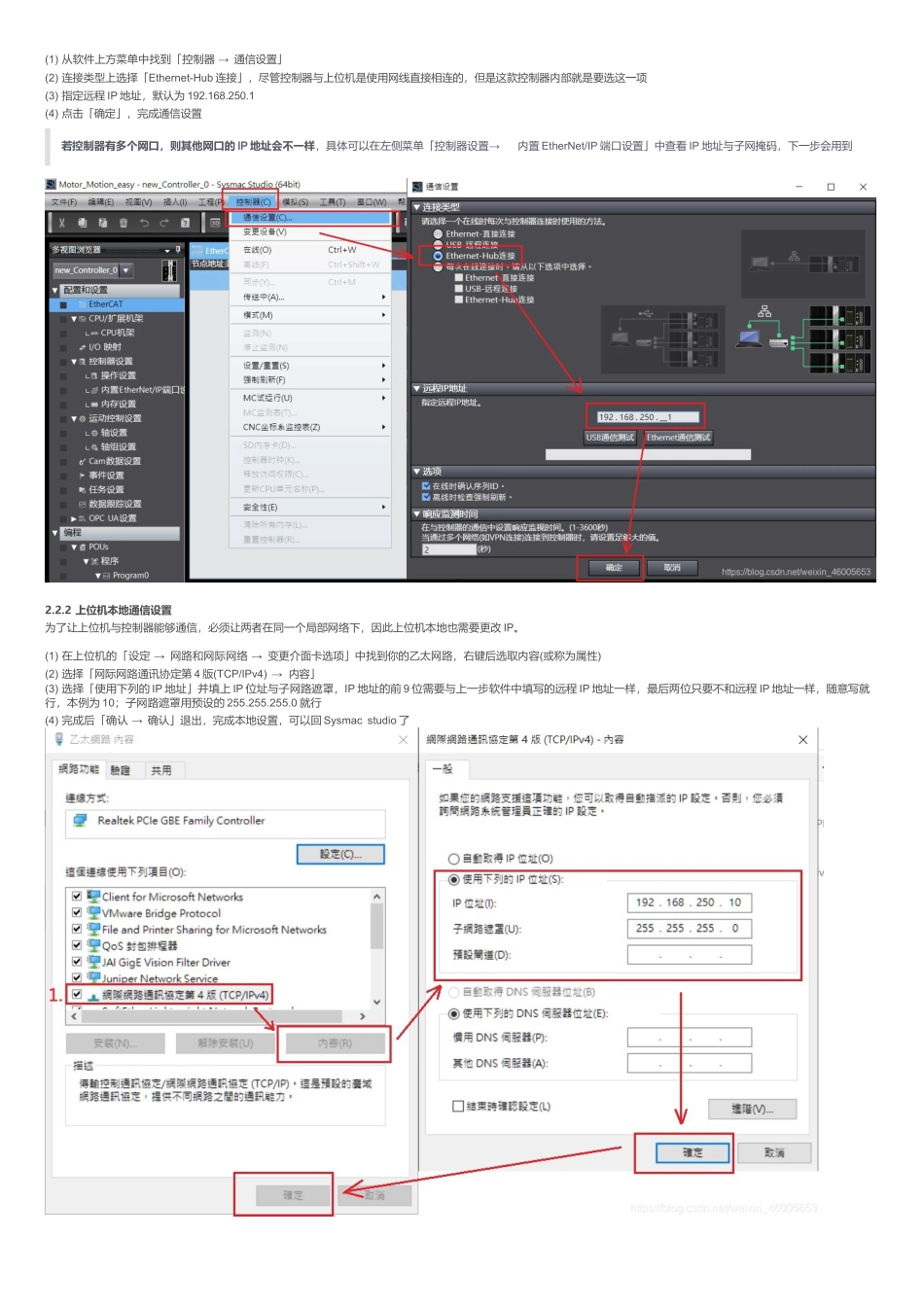
1软件内通信设置2
2上位机本地通信设置2
1控制器配置导入实际控制器框架建立控制器变量2
2电机配置导入电机轴基本设置单位换算设置操作设置0
前言笔者最近需要使用到欧姆龙的多轴运动控制器来控制电机运动,但网路上关于Sysmacstudio的教程或文章较为零散,作为初学者的笔者难以消化,故在稍微会用软件后撰写本文,为自己留个笔记,同时希望能够帮助到需要的人
本文面向买了欧姆龙控制器与电机,装上SysmacStudio软件却不会用、不熟悉大部分操作的人,小白适用
本文教学内容所用的硬件如下:一台能使用Sysmacstudio的上位机欧姆龙运动控制器一台:NX102-9000(硬件版本:1
42)伺服电机一台:零差云控机器人关节80I控制器电源:24VDC电机驱动器电源:根据电机而定,本文使用的电机输入电压为48VDC3
本文的任务目标为:使用欧姆龙控制器,通过Sysmacstudio编程进行电机轴与通信的基本配置,不涉及电机运动编程
本人水平有限,若有错误与建议还请多加指教,谢谢
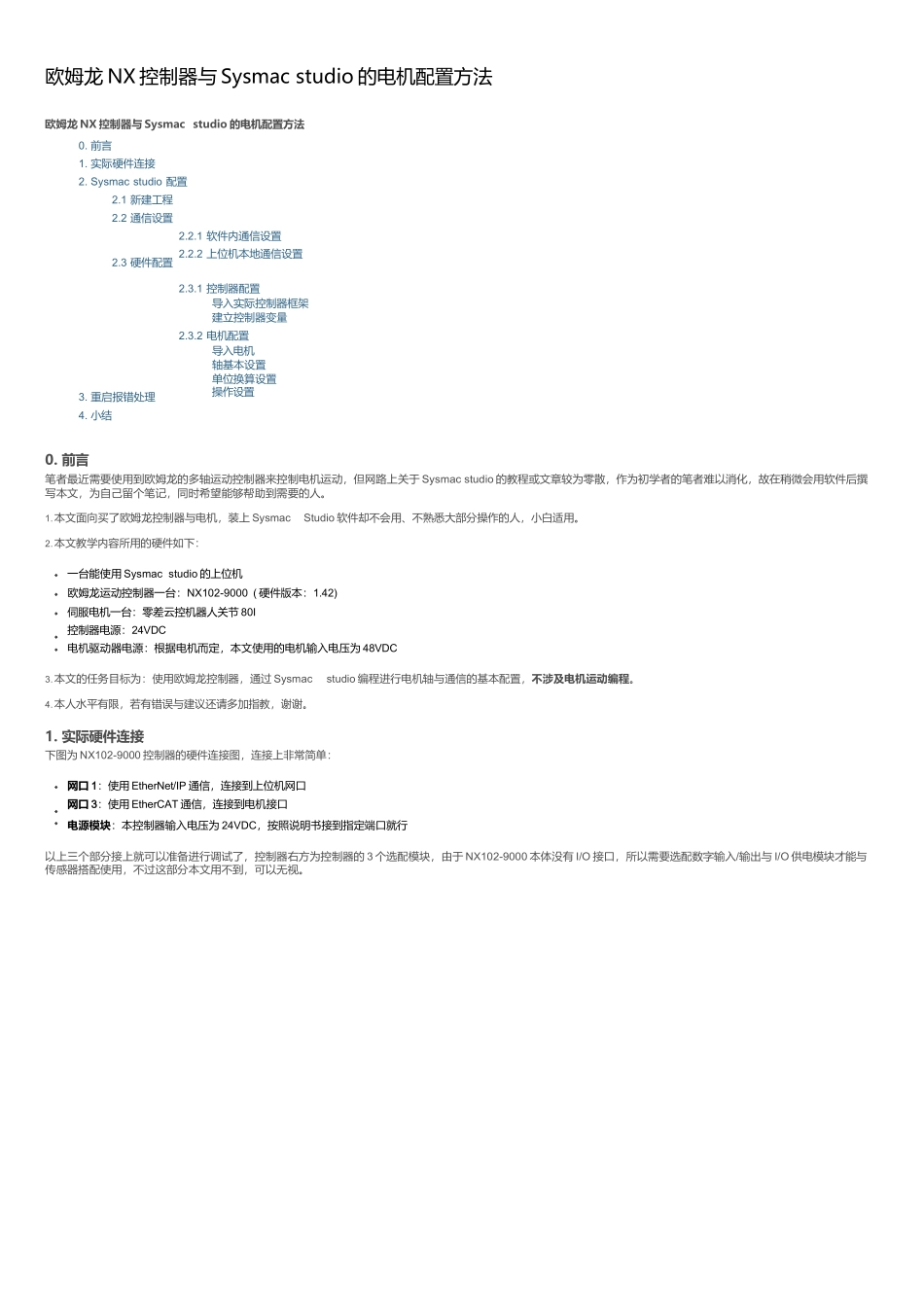
实际硬件连接下图为NX102-9000控制器的硬件连接图,连接上非常简单:网口1:使用EtherNet/IP通信,连接到上位机网口网口3:使用EtherCAT通信,连接到电机接口电源模块:本控制器输入电压为24VDC,按照说明书接到指定端口就行以上三个部分接上就可以准备进行调试了,控制器右方为控制器的3个选配模块,由于NX102-9000本体没有I/O接口,所以需要选配数字输入/输出与I/O供电模块才能与传感器搭配使用,不过这部分本文