六自由度机械臂自动取书装置制作者:孔超 指导老师:朱弘峰【内容摘要】:本文分析介绍了六自由度机械臂自动取书装置的设计,包括工作原理、各个模块的的设计,重点分析了技术方案,在项目制作过程中遇到的难点,编程的设计
【关键词】:六自由度、机械臂、编程 1
项目背景及意义该项目来源于我们的日常生活的发现,在图书馆的日常管理中,我们发现当我们想借阅书本时,往往先通过系统查找自己想要借阅的书籍,然后去书库根据号码来寻找,但在寻找的过程中,有时会出现找不到书,或者废了好大劲才找到,我们发现人工取书并不能很好的满足图书借阅人的日常需求,因此亟需一个图书馆自动取书装置,来实现书籍借阅的自动化
在国内外,自动取书装置还不够完善,最先近的德国也只是实现了书籍的自动传送,并没有涉及从书架取书的自动化装置
该装置能完成的任务有能够分辨不同的书籍;将指定的书籍从书架中取出以及把取出的书放在篮子里的一系列动作
工作原理 六自由度机械臂自动取书装置的工作原理是由摄像头采集图像信号并传递给单片机,由单片机对图像信号进行处理,分辨出不同的书,然后控制机械臂上的舵机执行夹持书本的动作,最后将书放到指定位置
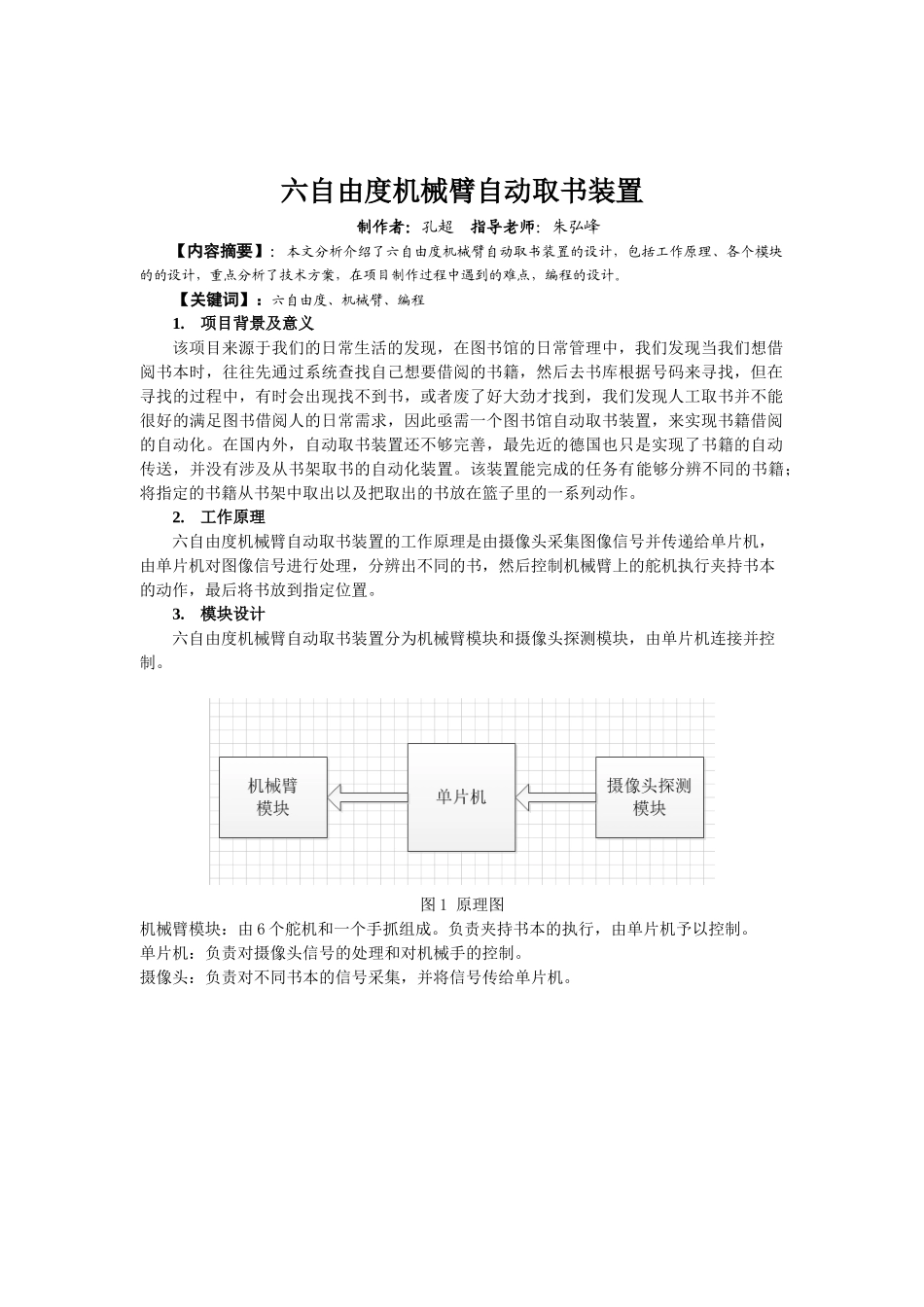
模块设计六自由度机械臂自动取书装置分为机械臂模块和摄像头探测模块,由单片机连接并控制
图 1 原理图机械臂模块:由 6 个舵机和一个手抓组成
负责夹持书本的执行,由单片机予以控制
单片机:负责对摄像头信号的处理和对机械手的控制
摄像头:负责对不同书本的信号采集,并将信号传给单片机
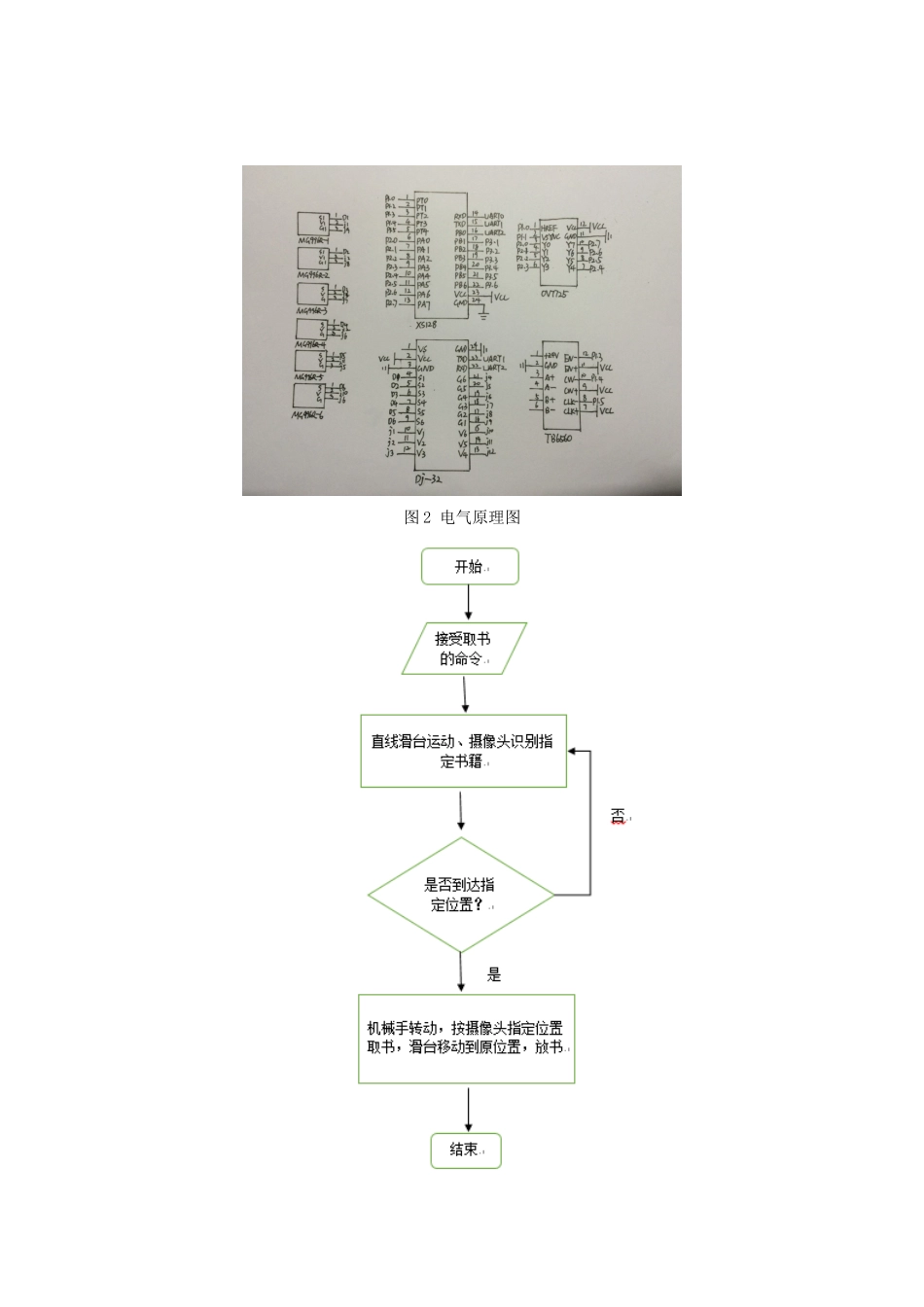
图 2 电气原理图图 3 程序流程图4
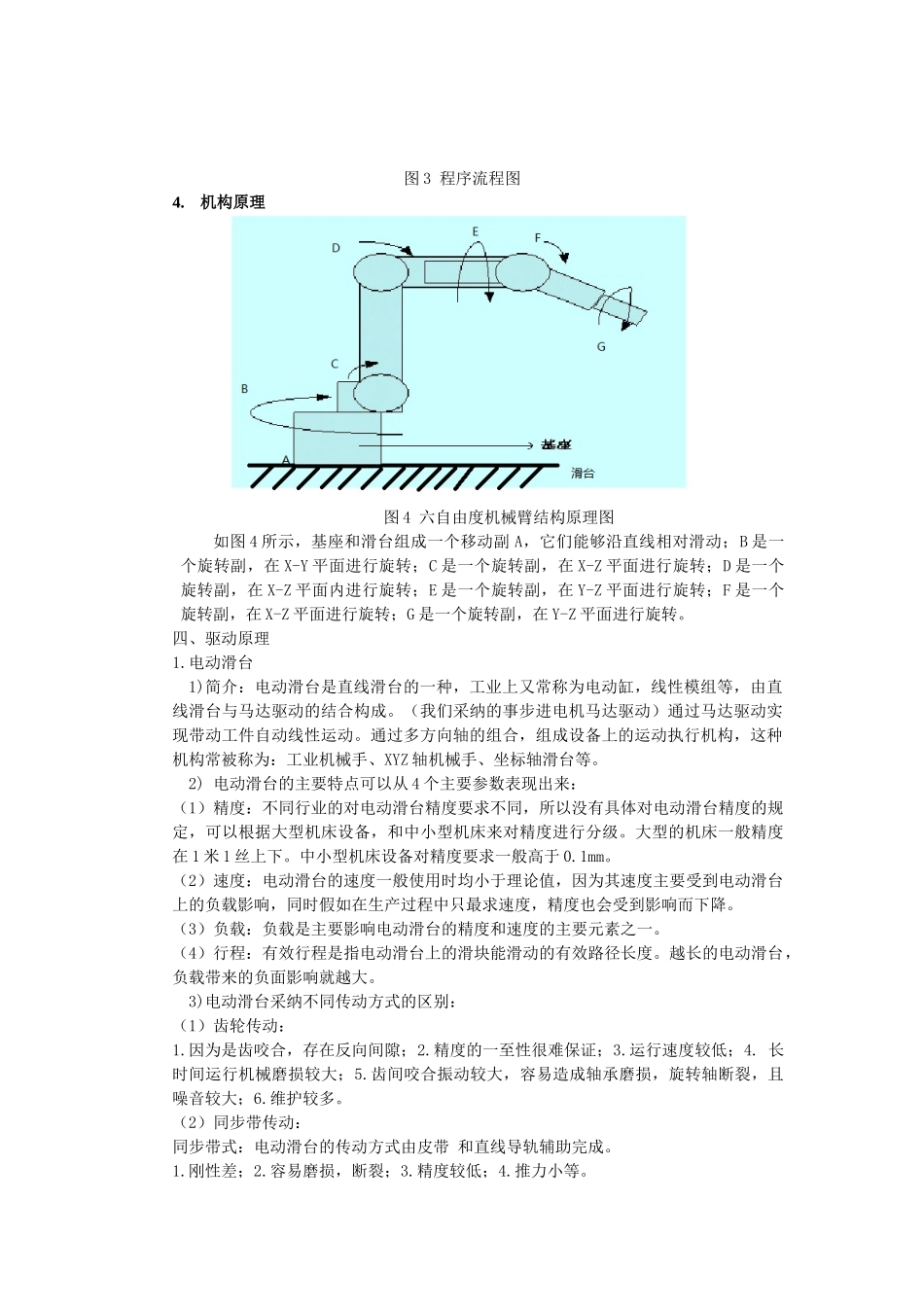
机构原理图 4 六自由度机械臂结构原理图如图 4 所示,基座和滑台组成一个移动副 A,它们能够沿直线相对滑动;B 是一个旋转副,在 X-Y 平面进行旋转;C 是一个旋转副,在 X-Z 平面进行旋转;D 是一个旋转副,在 X-Z 平面内进行旋转;E 是一个旋转副,在 Y-Z 平面进行旋