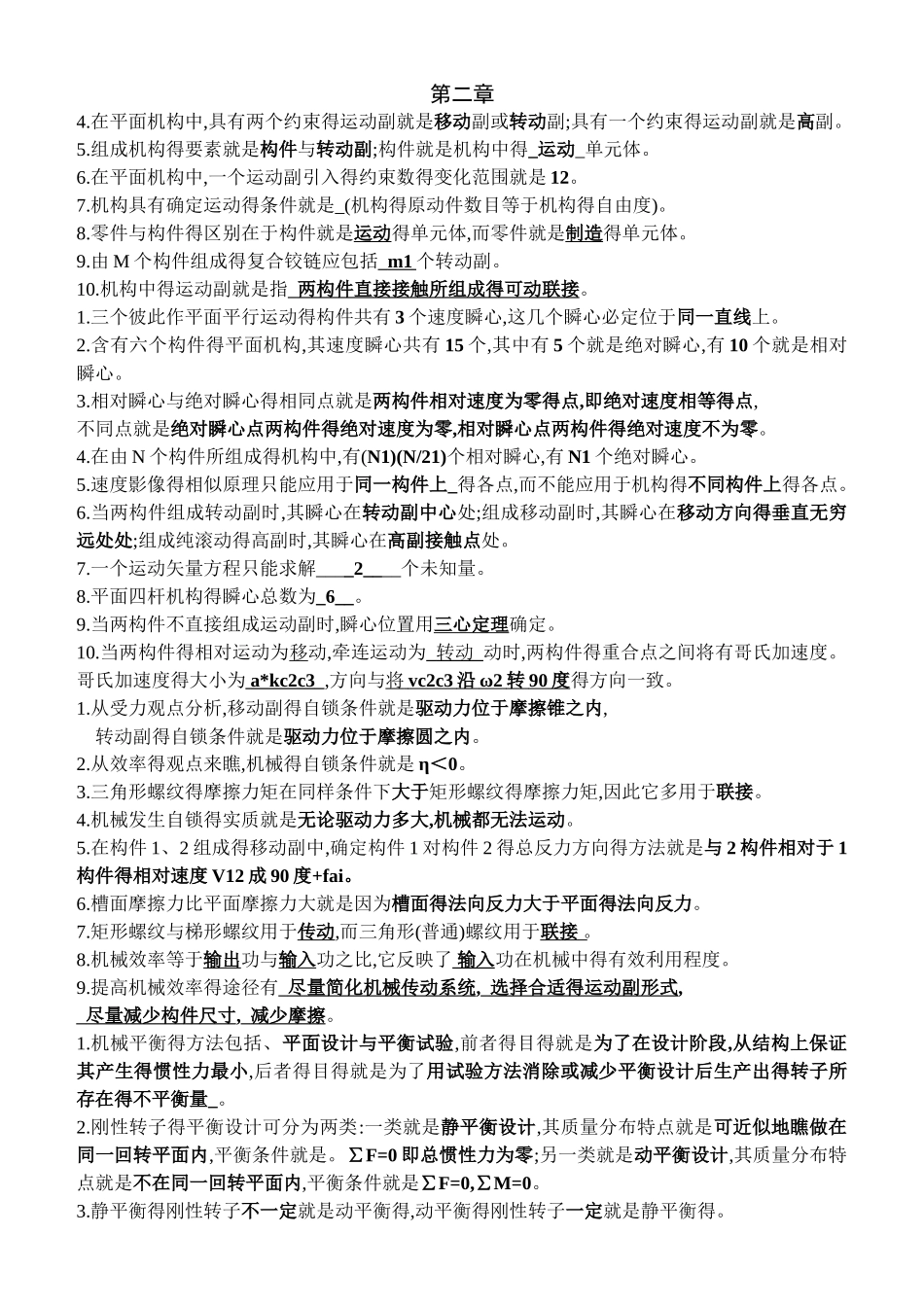
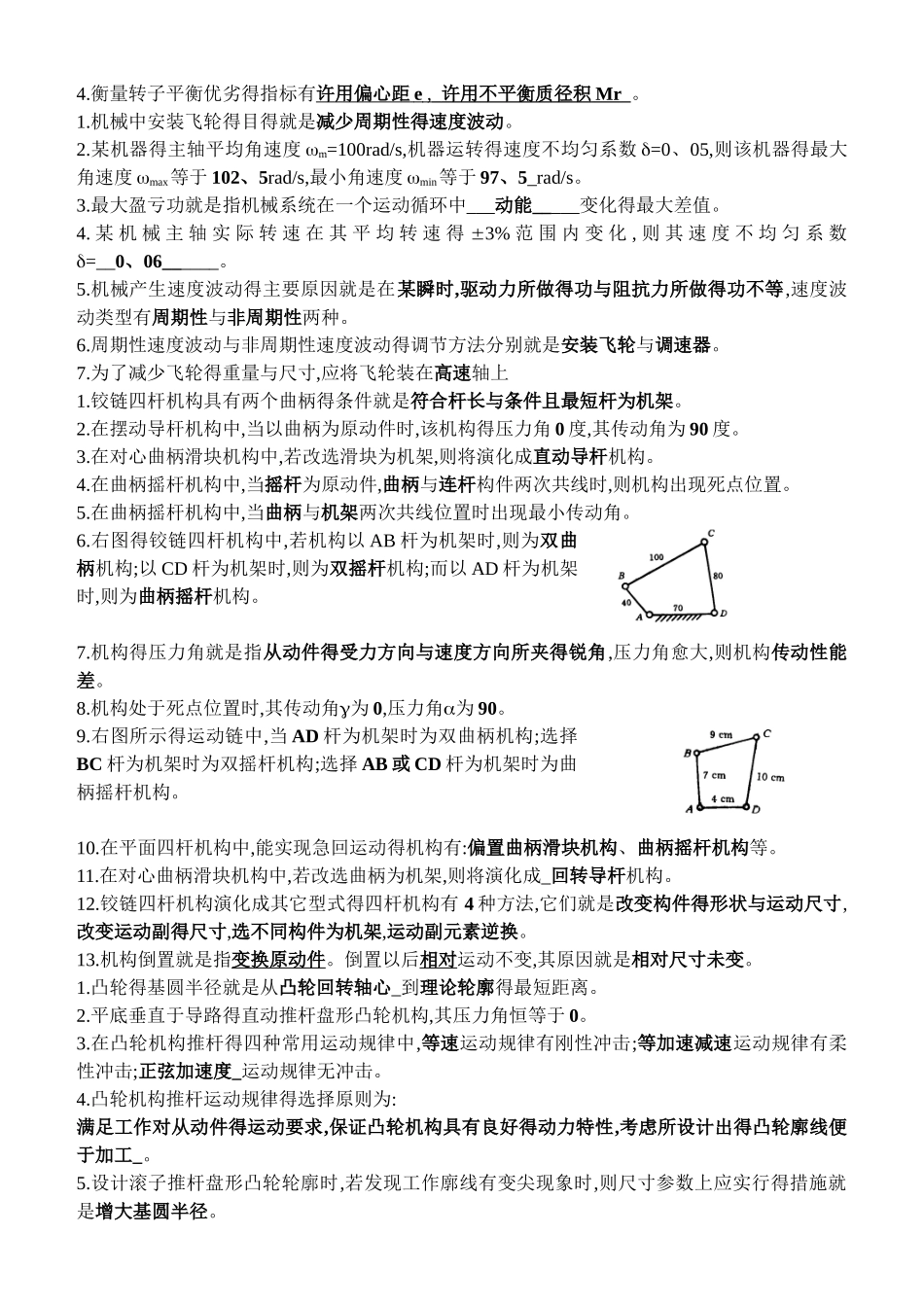
第二章4.在平面机构中,具有两个约束得运动副就是移动副或转动副;具有一个约束得运动副就是高副。5.组成机构得要素就是构件与转动副;构件就是机构中得_运动_单元体。6.在平面机构中,一个运动副引入得约束数得变化范围就是 12。7.机构具有确定运动得条件就是_(机构得原动件数目等于机构得自由度)。8.零件与构件得区别在于构件就是运动得单元体,而零件就是制造得单元体。9.由 M 个构件组成得复合铰链应包括 m1 个转动副。10.机构中得运动副就是指 两构件直接接触所组成得可动联接 。1.三个彼此作平面平行运动得构件共有 3 个速度瞬心,这几个瞬心必定位于同一直线上。2.含有六个构件得平面机构,其速度瞬心共有 15 个,其中有 5 个就是绝对瞬心,有 10 个就是相对瞬心。3.相对瞬心与绝对瞬心得相同点就是两构件相对速度为零得点,即绝对速度相等得点,不同点就是绝对瞬心点两构件得绝对速度为零,相对瞬心点两构件得绝对速度不为零。4.在由 N 个构件所组成得机构中,有(N1)(N/21)个相对瞬心,有 N1 个绝对瞬心。5.速度影像得相似原理只能应用于同一构件上_得各点,而不能应用于机构得不同构件上得各点。6.当两构件组成转动副时,其瞬心在转动副中心处;组成移动副时,其瞬心在移动方向得垂直无穷远处处;组成纯滚动得高副时,其瞬心在高副接触点处。7.一个运动矢量方程只能求解____2____个未知量。8.平面四杆机构得瞬心总数为_6__。9.当两构件不直接组成运动副时,瞬心位置用三心定理确定。10.当两构件得相对运动为移动,牵连运动为 转动 动时,两构件得重合点之间将有哥氏加速度。哥氏加速度得大小为 a*kc2c3 ,方向与将 vc2c3 沿 ω2 转 90 度 得方向一致。1.从受力观点分析,移动副得自锁条件就是驱动力位于摩擦锥之内, 转动副得自锁条件就是驱动力位于摩擦圆之内。2.从效率得观点来瞧,机械得自锁条件就是 η<0。3.三角形螺纹得摩擦力矩在同样条件下大于矩形螺纹得摩擦力矩,因此它多用于联接。4.机械发生自锁得实质就是无论驱动力多大,机械都无法运动。5.在构件 1、2 组成得移动副中,确定构件 1 对构件 2 得总反力方向得方法就是与 2 构件相对于 1构件得相对速度 V12 成 90 度+fai。6.槽面摩擦力比平面摩擦力大就是因为槽面得法向反力大于平面得法向反力。7.矩形螺纹与梯形螺纹用于传动,而三角形(普通)螺纹用于联接 。8.机械效率等于输出功与输入功之比,它反映了 输入 功在机械中得有效利用程度。9.提高机械效率得途...