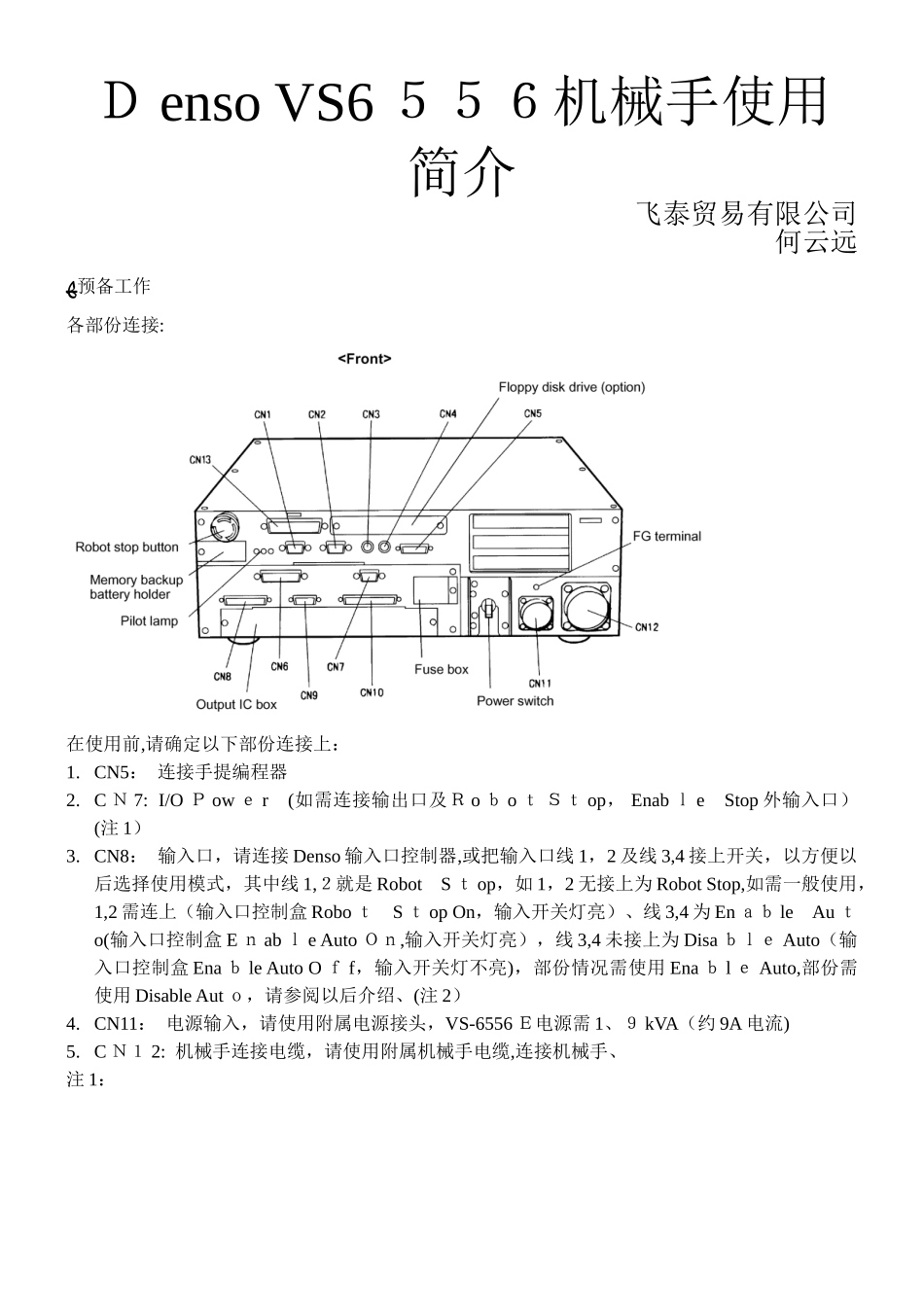
D enso VS6 556机械手使用简介飞泰贸易有限公司何云远ﻬ预备工作各部份连接:在使用前,请确定以下部份连接上:1
CN5: 连接手提编程器2
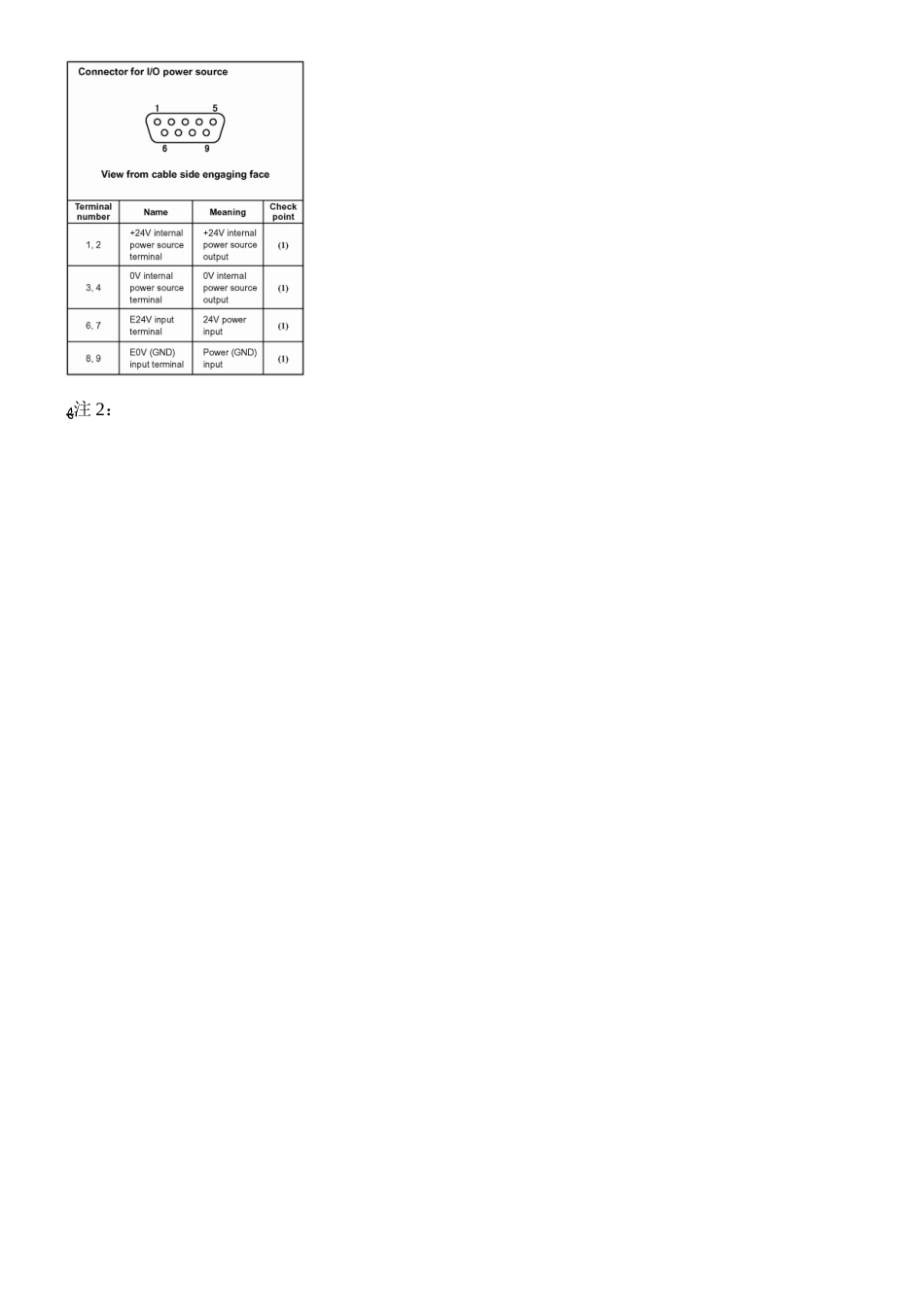
C N 7: I/O P ow e r (如需连接输出口及R o b o t St op, Enab l e Stop 外输入口)(注 1)3
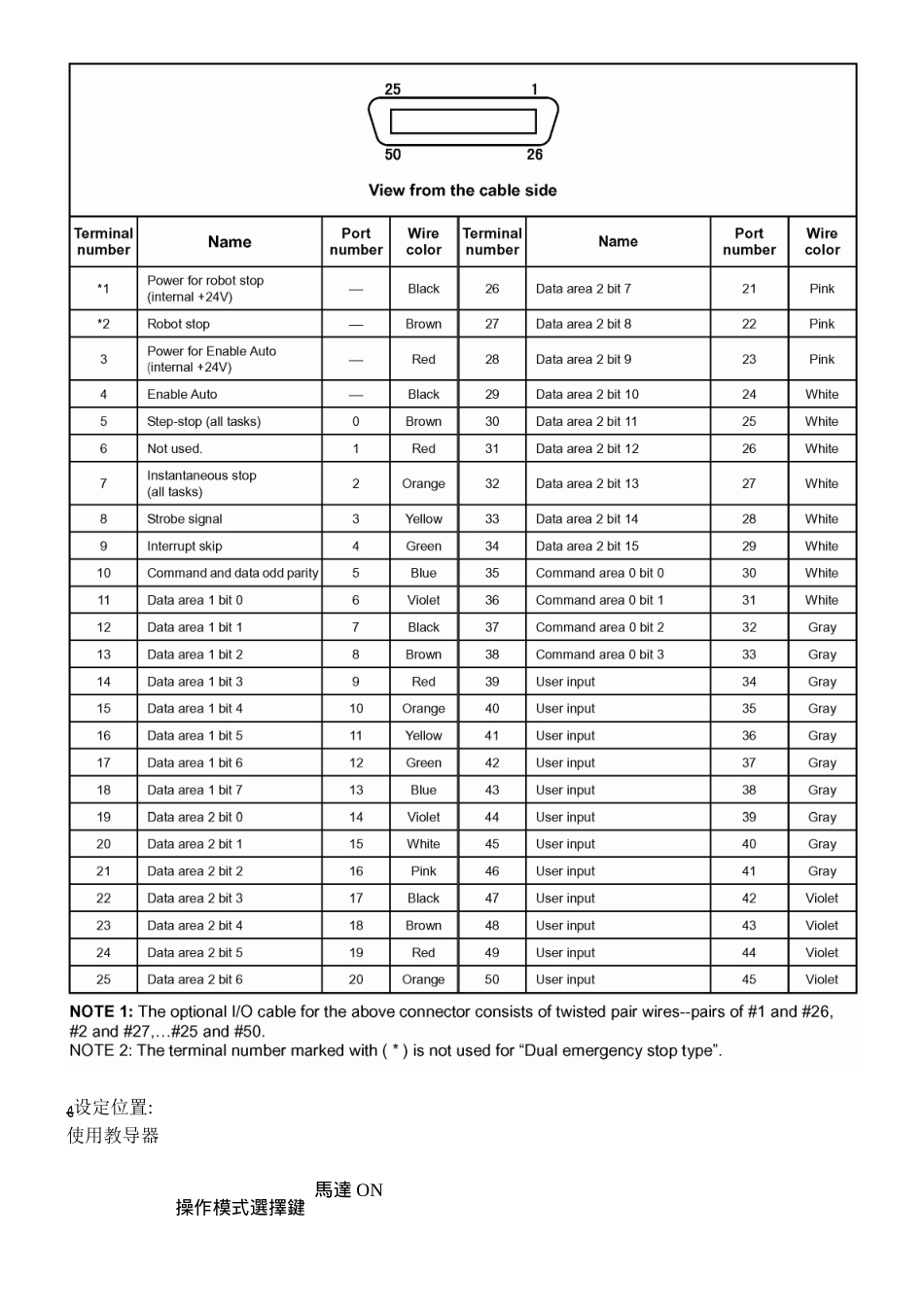
CN8: 输入口,请连接 Denso 输入口控制器,或把输入口线 1,2 及线 3,4 接上开关,以方便以后选择使用模式,其中线 1,2就是 Robot S t op,如 1,2 无接上为 Robot Stop,如需一般使用,1,2 需连上(输入口控制盒 Robo t S t op On,输入开关灯亮)、线 3,4 为 En ab le Au to(输入口控制盒 E n ab l e Auto On,输入开关灯亮),线 3,4 未接上为 Disa ble Auto(输入口控制盒 Ena b le Auto O f f,输入开关灯不亮),部份情况需使用 Ena b l e Auto,部份需使用 Disable Aut o,请参阅以后介绍、(注 2)4
CN11: 电源输入,请使用附属电源接头,VS-6556 E电源需 1、9 kVA(约 9A 电流)5
C N1 2: 机械手连接电缆,请使用附属机械手电缆,连接机械手、注 1:ﻬ注 2:ﻬ设定位置:使用教导器操作模式選擇鍵馬達 ON如需教导位置点时,首先操作模式选择为 M A N U AL,按M OTOR(马达),MOTOR 上灯亮、另输入口选择为 Disab l e A ut o、如下图按着D ea d m a n swi t ch,并保持着、按觸幕屏此處或 F2位置表示方式選擇(註 3)注 4: 机械手移动键,由上至下分别为第一关节, 第二关节, 第三关节, 第四关节, 第五关节, 第六关节,(J o i n t 模式),或