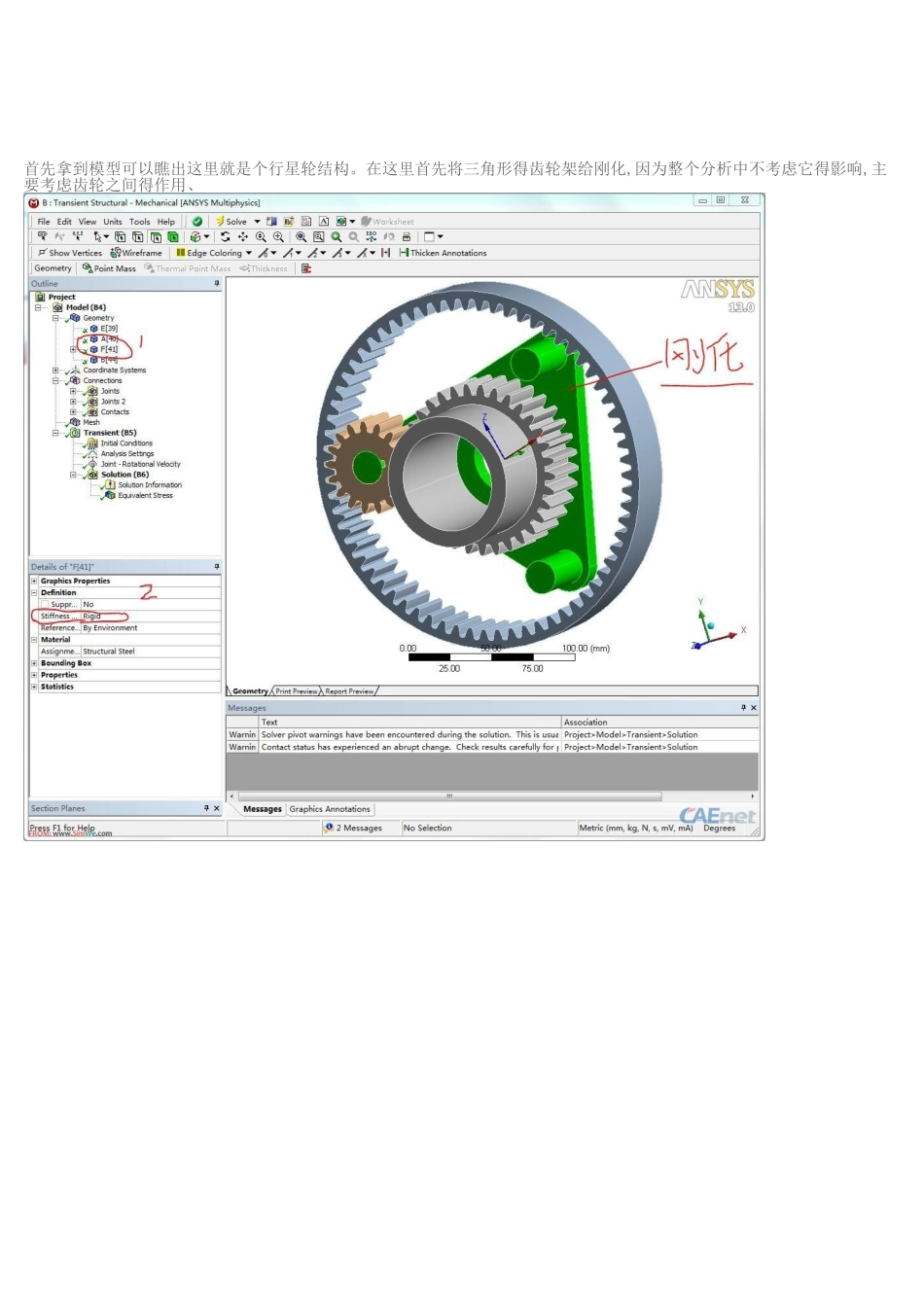
首先拿到模型可以瞧出这里就是个行星轮结构
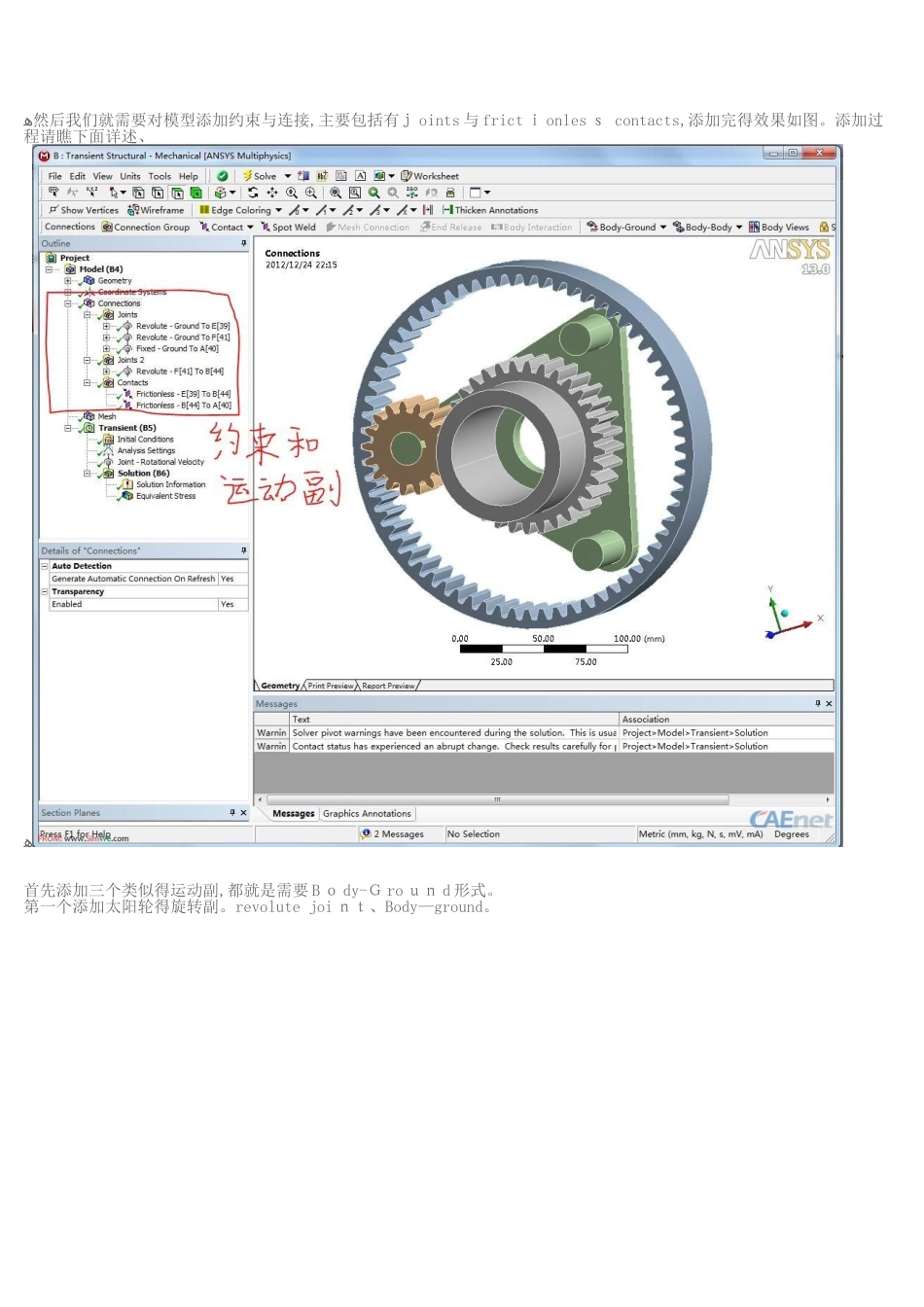
在这里首先将三角形得齿轮架给刚化,因为整个分析中不考虑它得影响,主要考虑齿轮之间得作用、 ﻫ然后我们就需要对模型添加约束与连接,主要包括有j oints 与 frict i onles s contacts,添加完得效果如图
添加过程请瞧下面详述、ﻫ首先添加三个类似得运动副,都就是需要 B o dy-G ro un d 形式
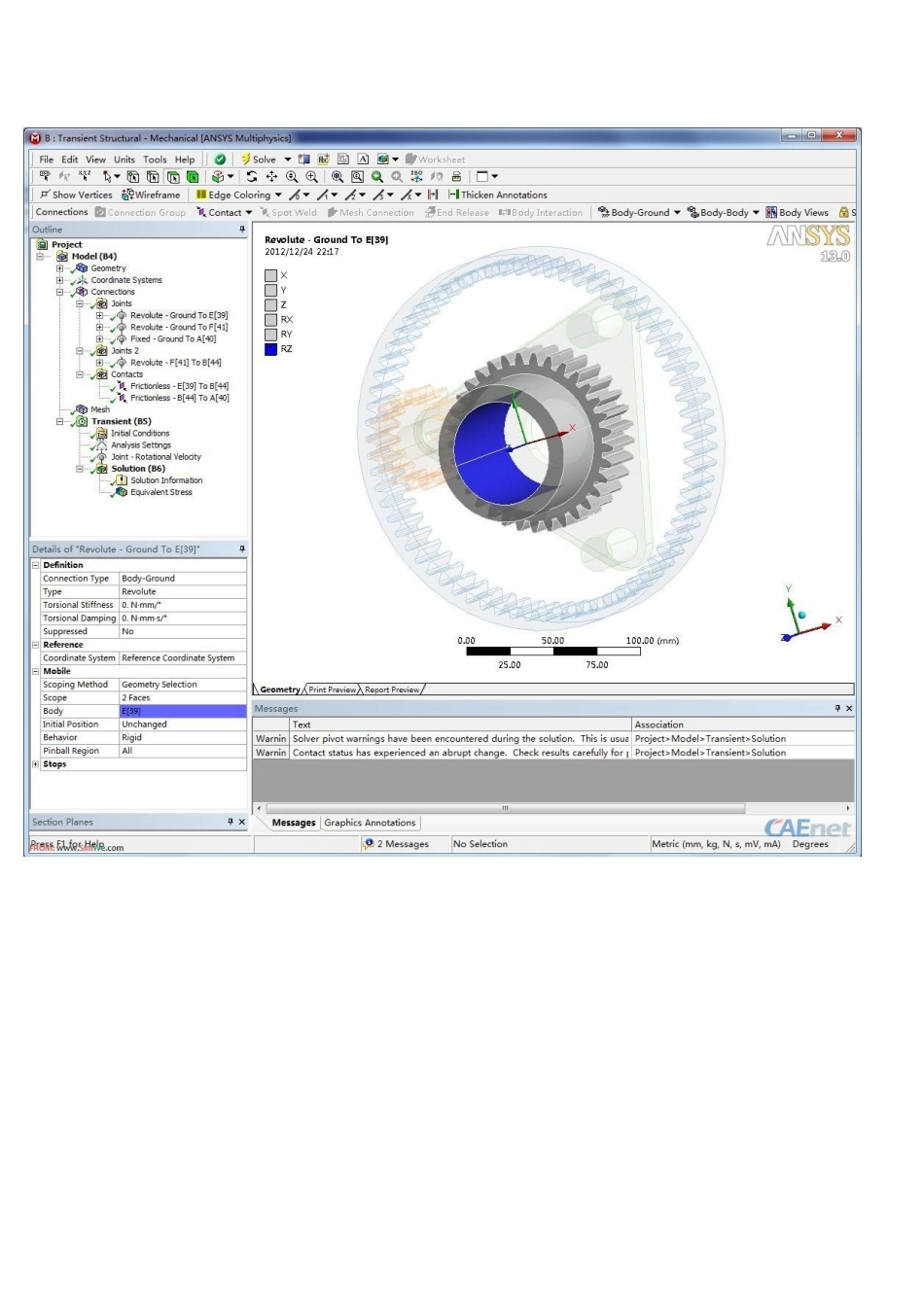
第一个添加太阳轮得旋转副
revolute joi nt、Body—ground
ﻫ再添加三角架得旋转副、r ev ol u t e joint、Bo d y—grou n d、ﻫ再添加内齿圈得固定副
f ixe d joint、B od y—groun d
ﻫﻫ接着添加一个 B o dy-Bo d y 得旋转副,也就就是三角板与行星轮之间得旋转连接、r evol u te
Body-B o by
ﻫ最后就就是两个齿轮之间得接触关系设置、根据经验,在不考虑齿轮间摩擦得情况下,选择 f ri c tio n l ess 接触类型
之后,c on n ect i o n s 定义完全后,就可以对其进行网格划分
网格划分这里完全采纳Aut omatic 不详述
ﻫﻫ在之间添加了 j oi nts 得基础之上,现在可以施加Jo in t l o a d,这里我们取太阳轮为主动轮,添加ﻫﻫ TOP回复 引用一个 R ot a t io na l V e loc i ty 得 l o ad
ﻫ最后,个人认为也就是最关键得,就就是对瞬态分析得参数(时间步)进行设置
ﻫﻫ最后得最后,经过一个半小时得计算,得到计算结果、帮帮帮帮帮、