第十章机械传动系统及其传动比第一节定轴轮系的传动比计算在实际应用的机械中,为了满足各种需要,例如需要较大的传动比或作远距离传动等,常采用一系列互相啮合的齿轮来组成传动装置
这种由一系列齿轮组成的传动装置称为齿轮系统,简称轮系
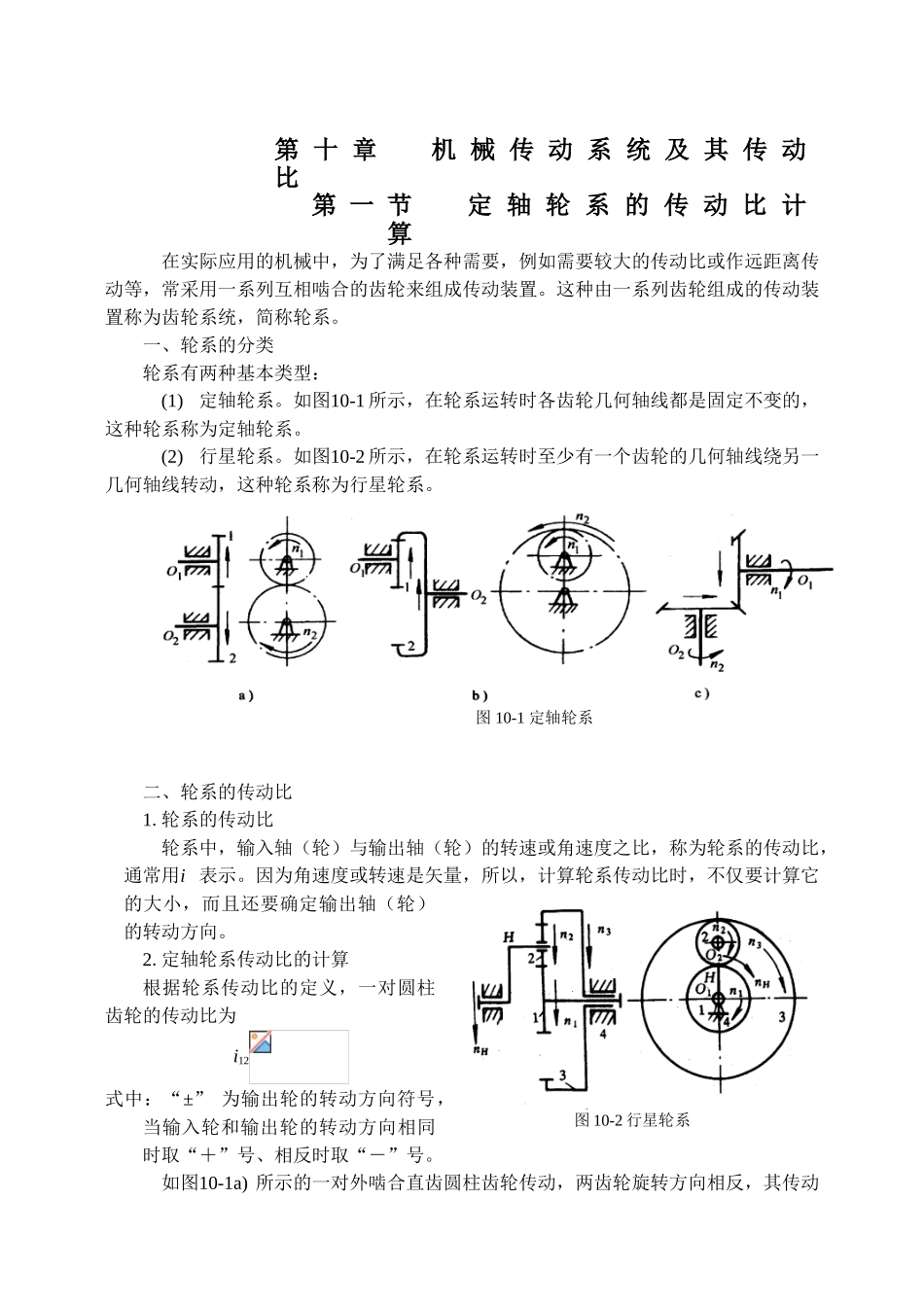
一、轮系的分类轮系有两种基本类型:(1)定轴轮系
如图10-1所示,在轮系运转时各齿轮几何轴线都是固定不变的,这种轮系称为定轴轮系
(2)行星轮系
如图10-2所示,在轮系运转时至少有一个齿轮的几何轴线绕另一几何轴线转动,这种轮系称为行星轮系
二、轮系的传动比1
轮系的传动比轮系中,输入轴(轮)与输出轴(轮)的转速或角速度之比,称为轮系的传动比,通常用i表示
因为角速度或转速是矢量,所以,计算轮系传动比时,不仅要计算它的大小,而且还要确定输出轴(轮)的转动方向
定轴轮系传动比的计算根据轮系传动比的定义,一对圆柱齿轮的传动比为i12式中:“±”为输出轮的转动方向符号,当输入轮和输出轮的转动方向相同时取“+”号、相反时取“-”号
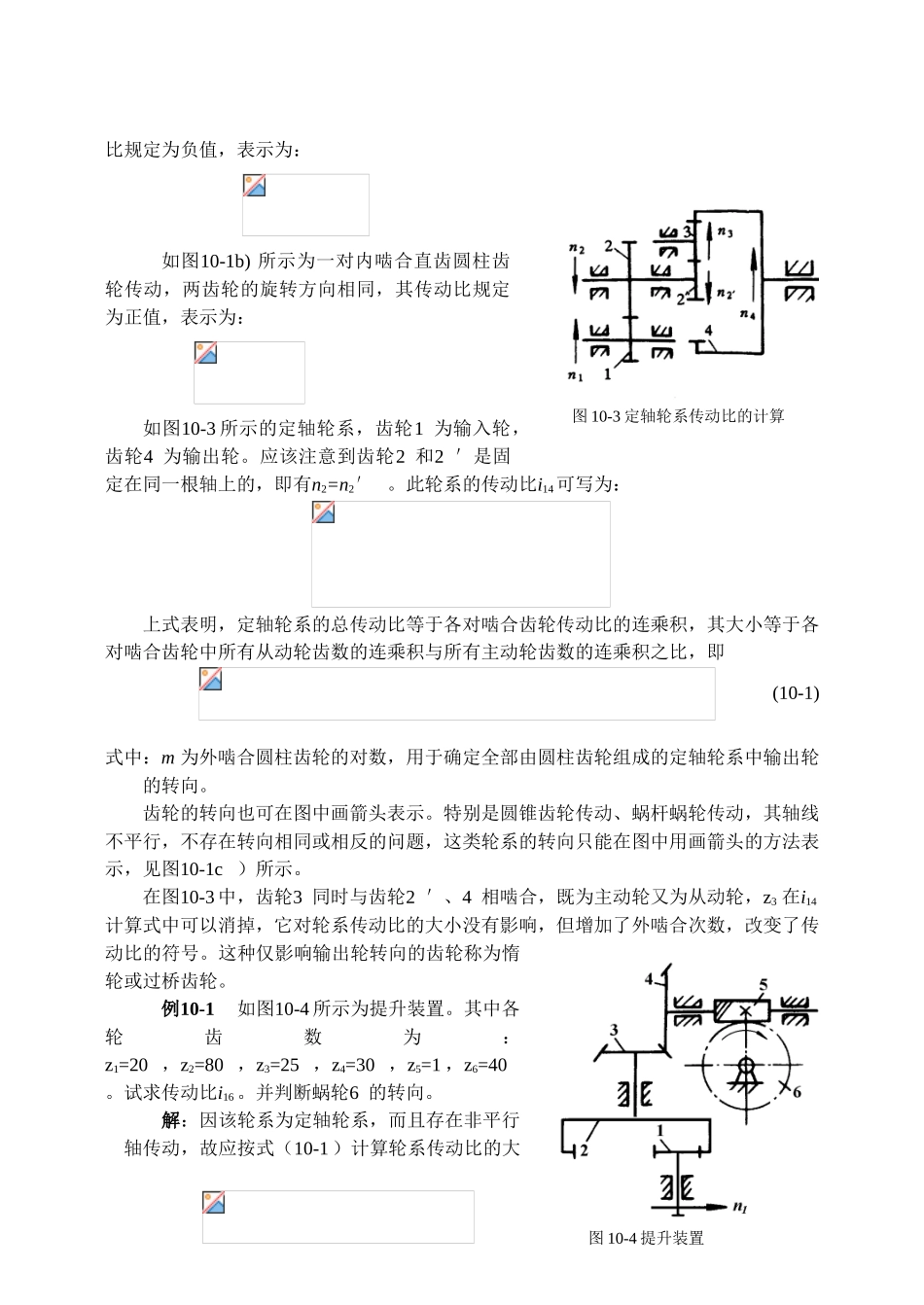
如图10-1a)所示的一对外啮合直齿圆柱齿轮传动,两齿轮旋转方向相反,其传动图10-1定轴轮系图10-2行星轮系比规定为负值,表示为:如图10-1b)所示为一对内啮合直齿圆柱齿轮传动,两齿轮的旋转方向相同,其传动比规定为正值,表示为:如图10-3所示的定轴轮系,齿轮1为输入轮,齿轮4为输出轮
应该注意到齿轮2和2'是固定在同一根轴上的,即有n2=n2′
此轮系的传动比i14可写为:上式表明,定轴轮系的总传动比等于各对啮合齿轮传动比的连乘积,其大小等于各对啮合齿轮中所有从动轮齿数的连乘积与所有主动轮齿数的连乘积之比,即(10-1)式中:m为外啮合圆柱齿轮的对数,用于确定全部由圆柱齿轮组成的定轴轮系中输出轮的转向
齿轮的转向也可在图中画箭头表示
特别是圆锥齿轮传动、蜗杆蜗轮传动,其轴线不平行,不存在转向相同或相反的问题,这类轮系的